在这里了解千眼狼最新动态
1实验背景
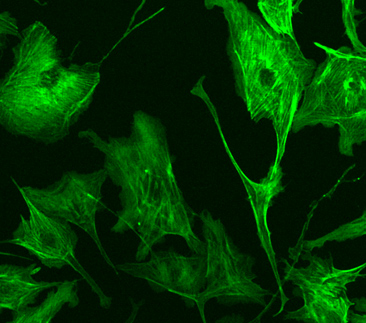
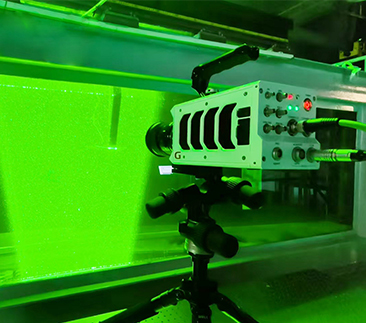
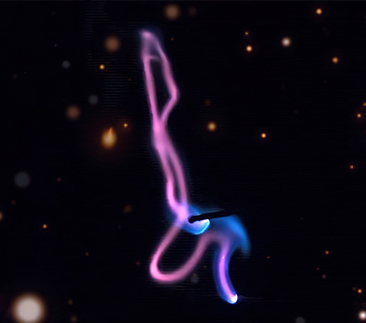
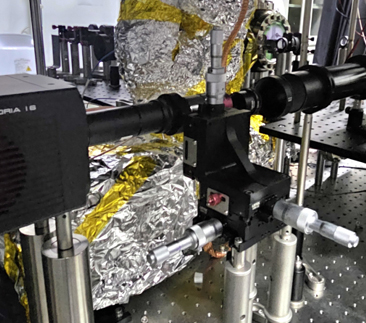
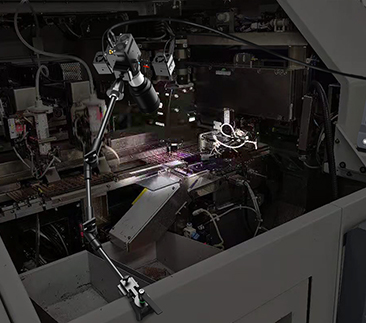
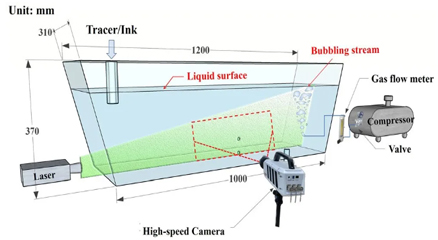
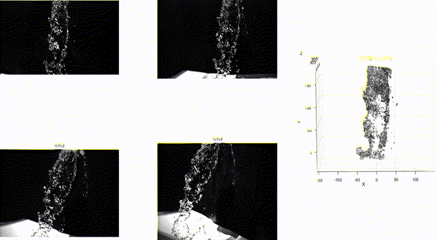
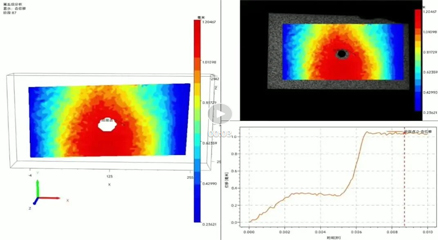
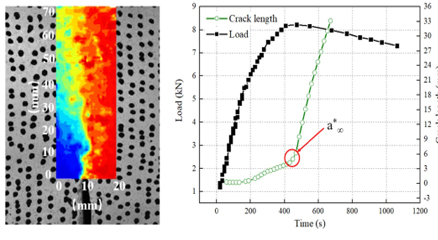
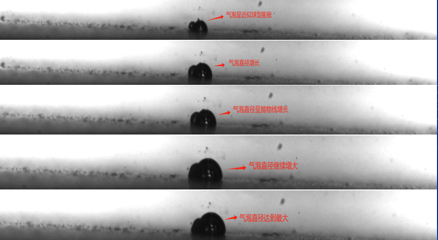
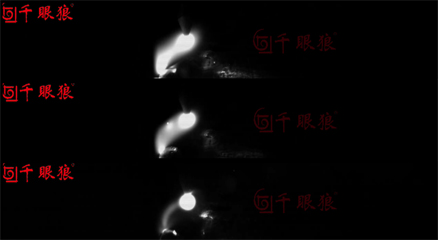
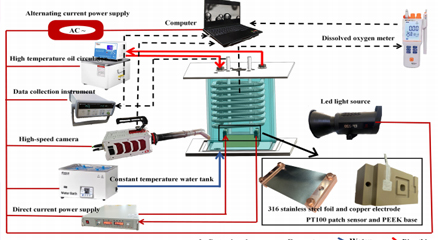
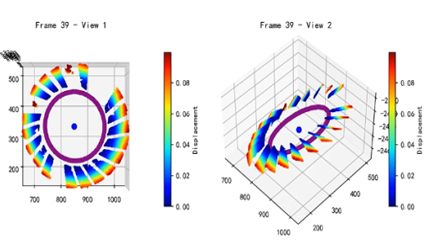
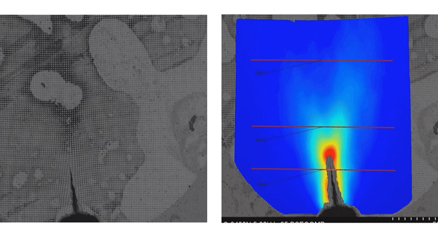
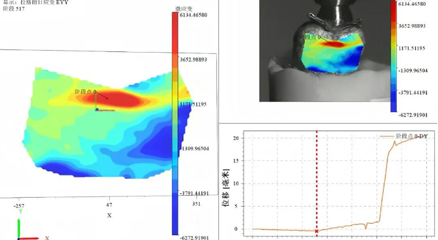
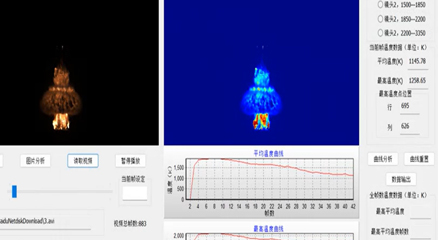
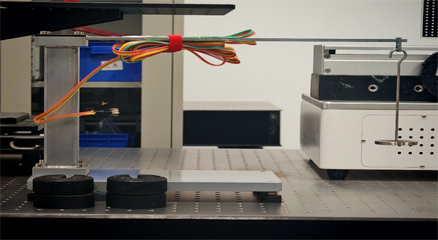
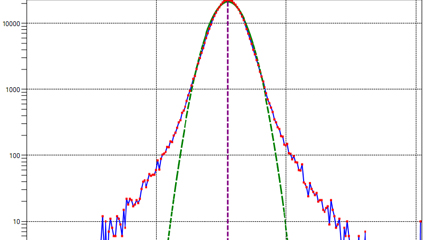
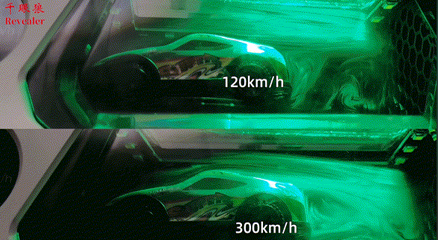
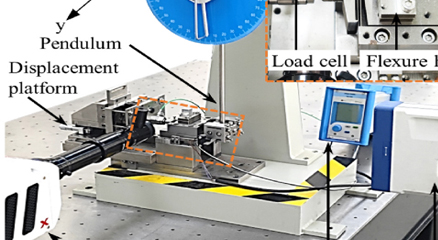
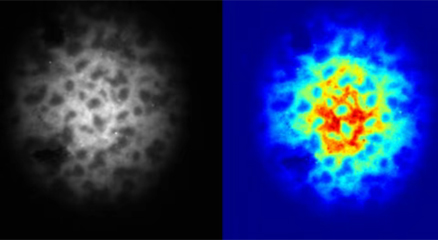
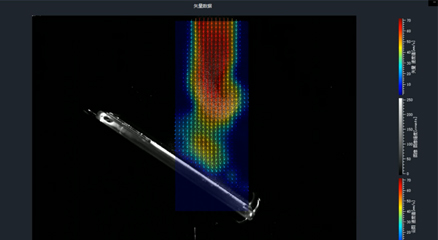
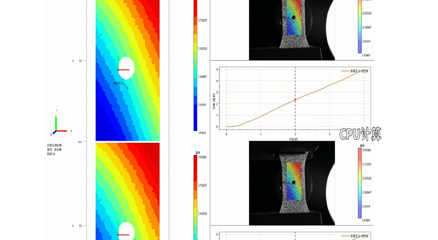
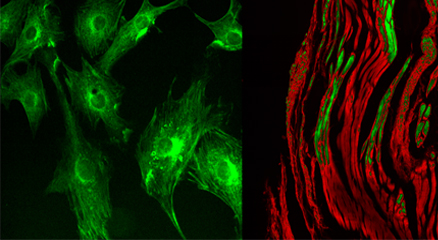
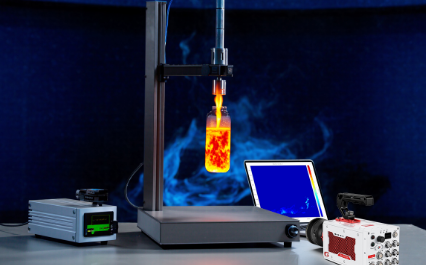
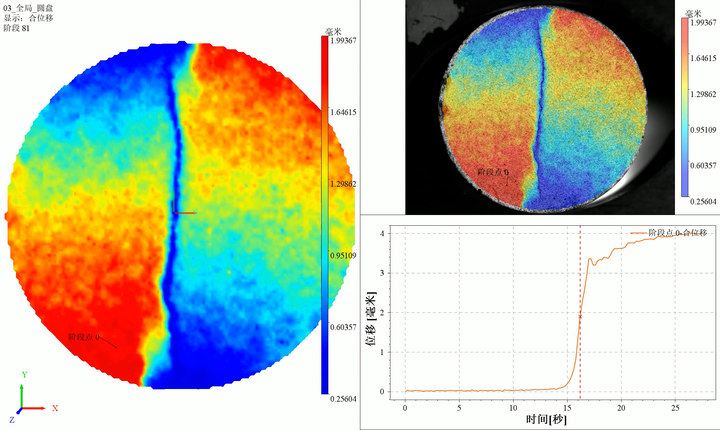
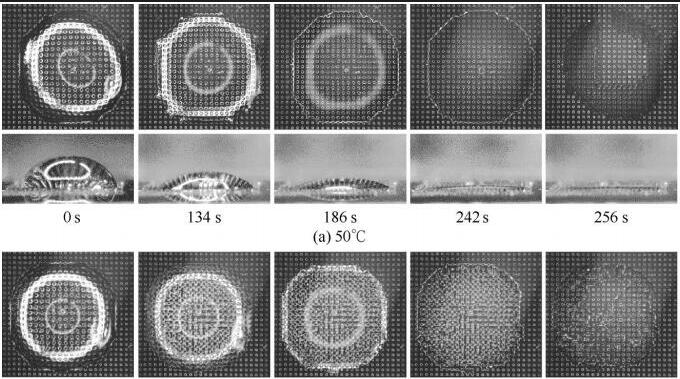
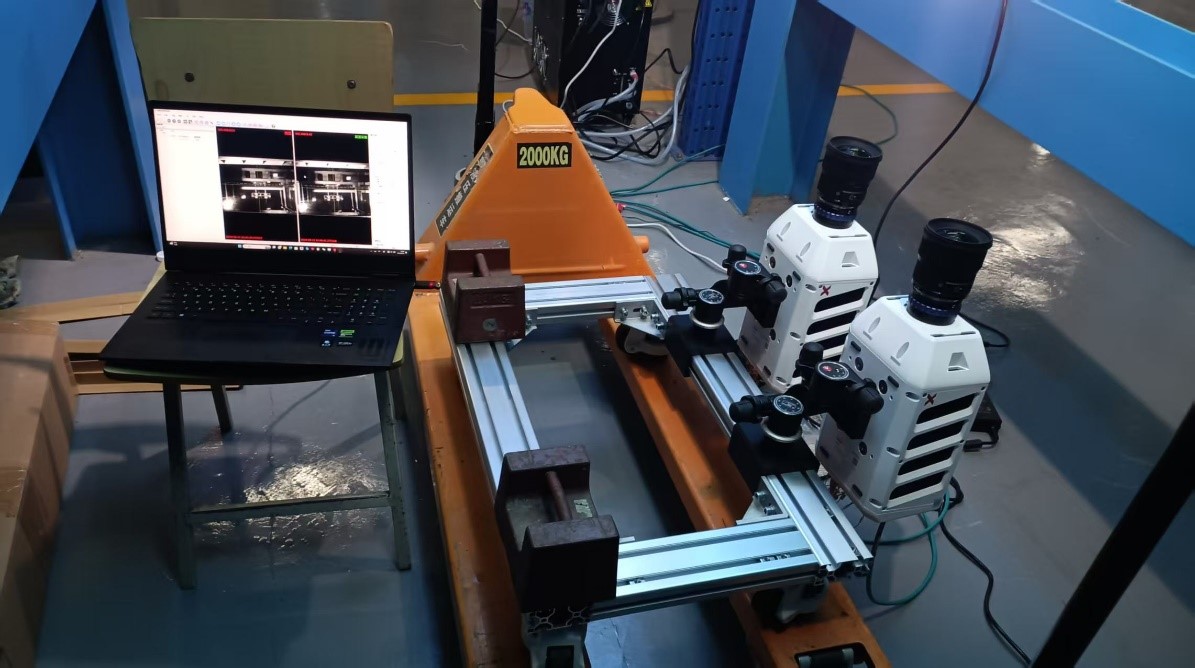
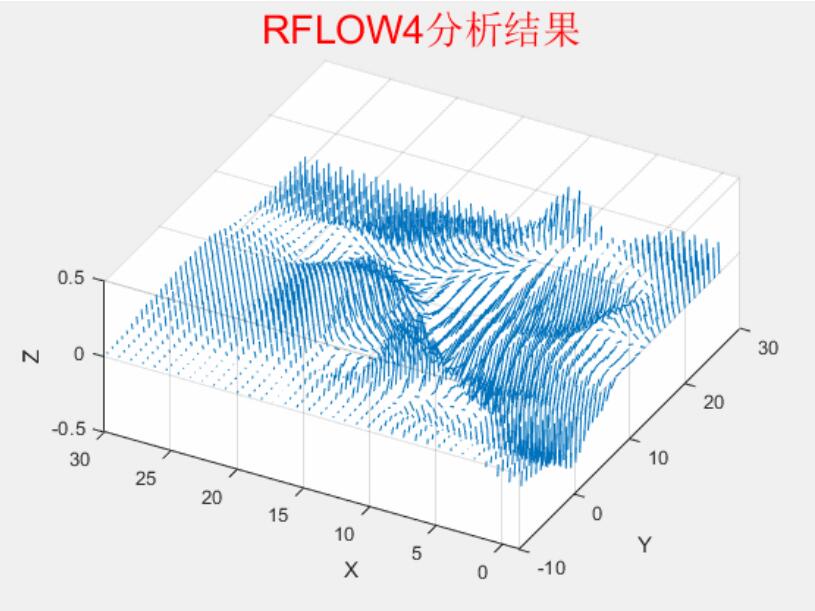
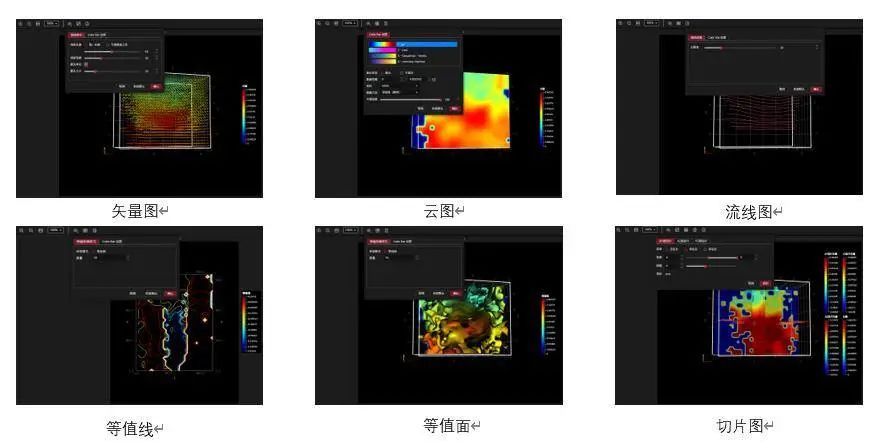
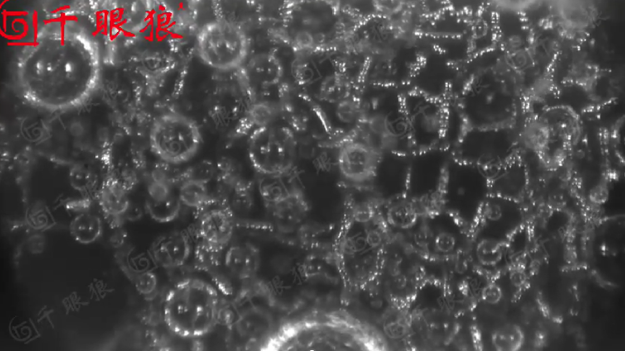
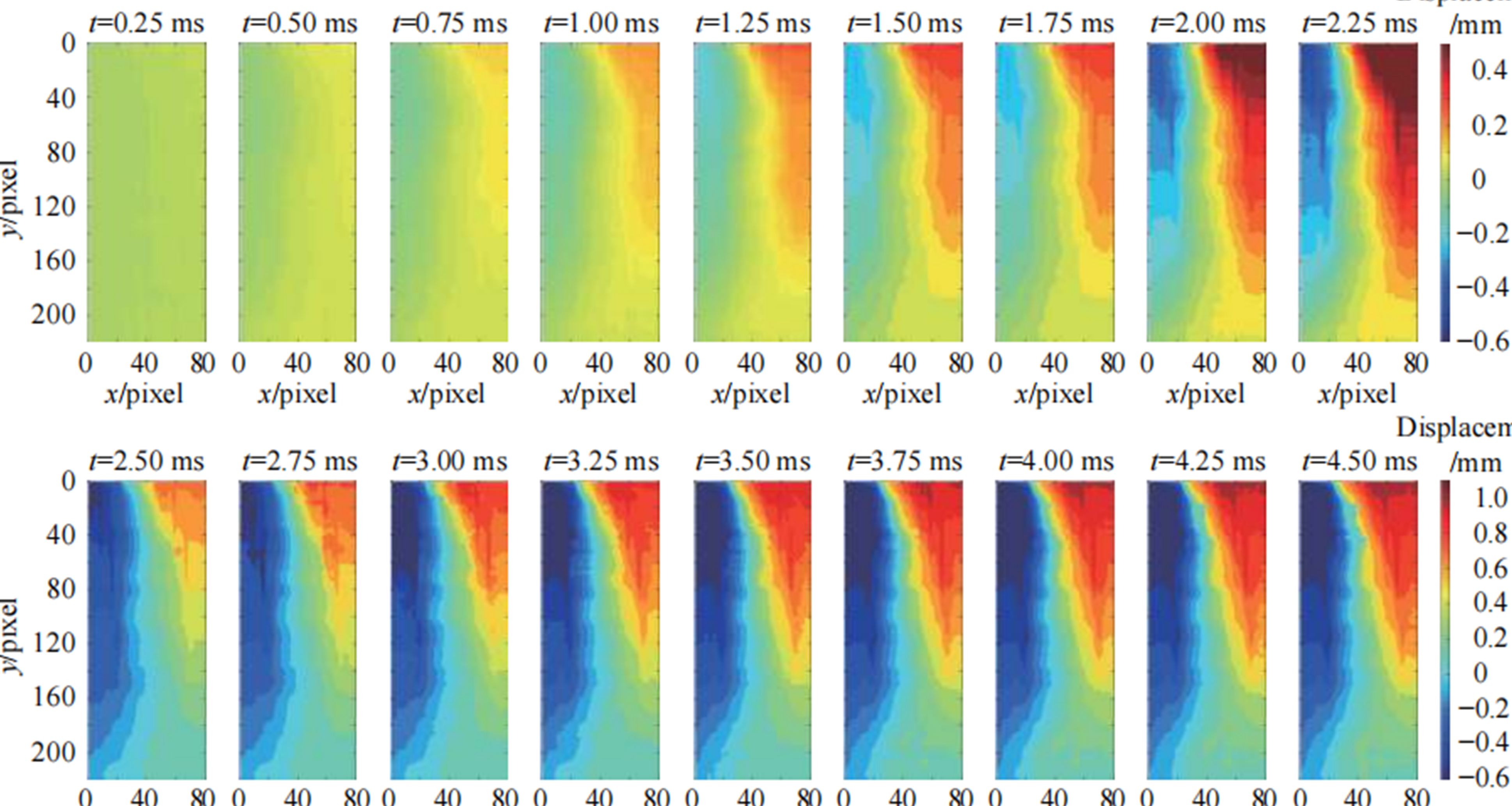
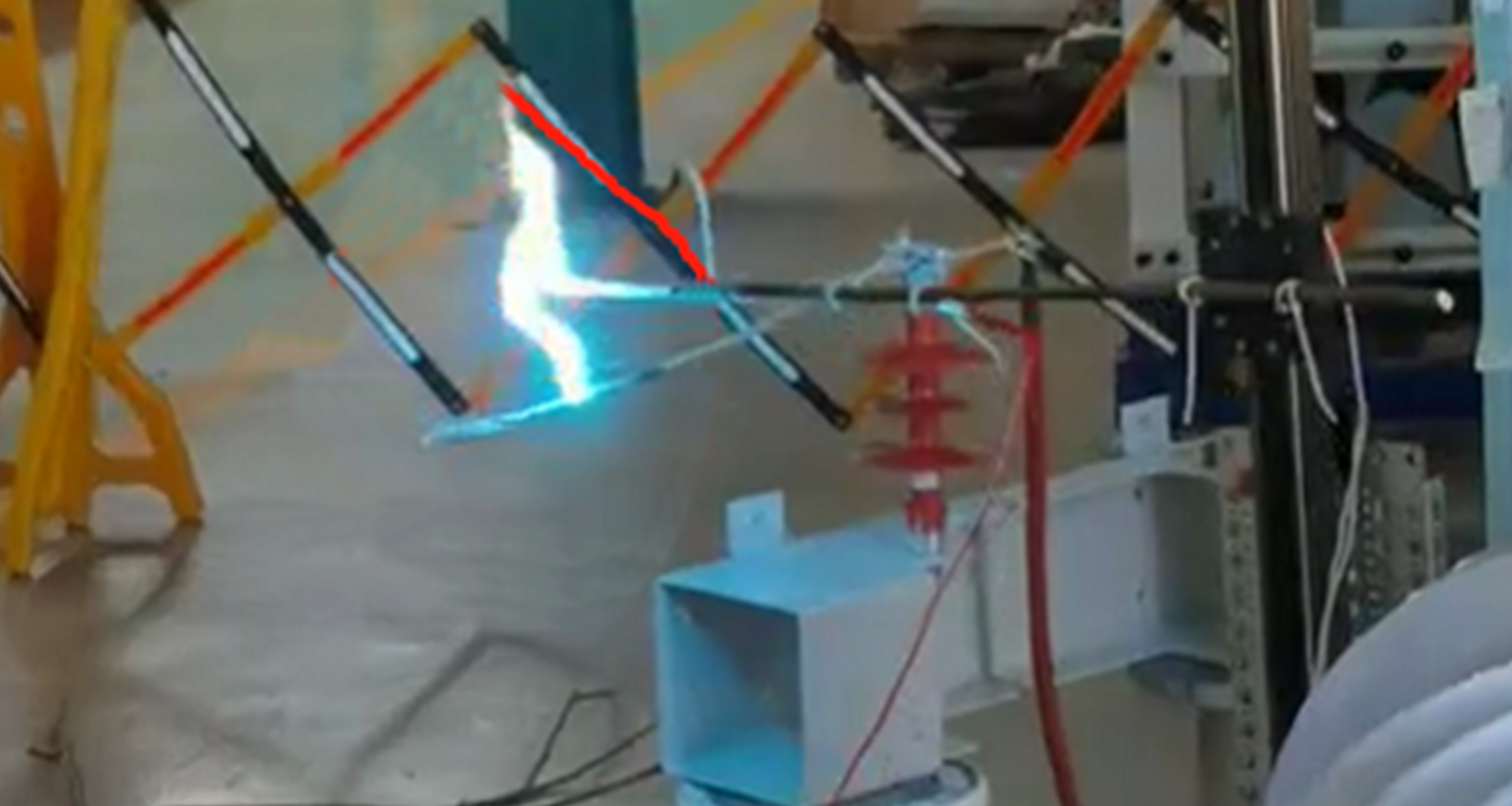
粒子图像测速PIV技术作为一种非侵入式全场流速测量技术,常用于各类流场实验研究中,但高速喷淋的液滴运动速度极高,普通高速摄像机时间分辨能力欠缺,难以清晰捕捉瞬态射流结构,且强散射背景下百微米级液滴的捕捉对图像信噪比要求极高,普通高速摄像机受感光度限制,在经济型低功率激光器下无法看清小液滴。 某实验室利用中科君达视界提供的千眼狼高感光度高速摄像机NEO25,搭载低能量的连续激光器和粒子图像测速PIV软件,经济且高效地实现喷淋流场的精确测量。 2实验设计 2.1 实验对象与工况 实验对象为模拟喷淋装置,工作介质为粒径范围100~200 μm水基液滴,喷射初速度约为20 m/s。 2.2 实验设备 高速成像设备:采用千眼狼高感光度高速摄像机NEO 25, 1280×1024@ 25000 fps。 光源系统:532 nm连续激光器,功率10 W。 粒子图像测速PIV软件:采用千眼狼Rflow4流场测量软件。 2.3 实验流程 搭建并校准PIV实验系统,将高感光度高速摄像机NEO25配备50 mm f/1.4定焦镜头,垂直布置在激光片平面方向,确保高速摄像机传感器平面与激光片平行。 根据预估流速和视场大小,采集帧率设置为10,000 fps,可保证液滴在帧间隔时间100 μs内的位移被有效捕捉,满足互相关算法要求。曝光时间设置为20 μs,小于帧间隔,以冻结高速运动的液滴,避免出现拖影。同时NEO25高速摄像机高感光度的优势弥补了短曝光带来的总光量不足。 对NEO25捕捉的图像序列进行速度矢量计算,第一轮使用64×64像素并逐步减小至32×32像素,获得瞬时速度矢量场,并对异常矢量通过中值滤波进行替换。 基于处理得到的大量瞬时速度矢量场计算时均速度场,用于分析喷淋流场的平均结构和湍流特性。 3实验数据 3.1 原始喷淋图 在NEO25高速摄像机捕捉的原始图像中,液滴在涡旋作用下不断被抛射、加速或减速,在涡旋交汇区域,可辨识液滴的碰撞、合并及大液滴的二次破碎现象(图1)。这些微观行为决定了液滴的粒径分布,是评判喷淋效率的关键。 图1 高感光度高速摄像机NEO25捕捉的原始图像 3.2瞬时速度云图 瞬时速度云图展示了喷淋出口处的高速射流核心区,形态并非呈完美的对称锥形分布,而是呈现出明显的脉动和弯曲,表明射流本身存在内在的不稳定性。通过计算并可视化对应的瞬时涡量场,发现大量尺度各异的涡旋结构,产生于高速射流与周围静止空气之间的强剪切层中,剪切层失稳后,涡旋经历卷起、配对、合并、耗散过程,促进液滴与空气、液滴与液滴之间的动量与质量交换(图2)。 图2 经PIV测量软件处理的瞬时速度云图 3.3 时均速度云图 利用千眼狼PIV流场测量软件Rflow4对大量瞬时流场进行平均,揭示了喷淋流场的整体流动性能。时均速度云图呈现出清晰、对称性较好的射流形态,可梯度分为射流核心区、过渡区、边缘区。时均速度场云图显示,受卷吸作用影响,时均速度沿轴向逐渐衰减,沿径向呈高斯分布特征(见图3)。时均速度场云图可视化展示了喷淋头的覆盖范围和速度衰减规律,成为评估喷淋系统能否有效覆盖目标区域的核心指标。本次实验结果显示喷淋覆盖范围符合设计预期。 图3 经PIV测量软件处理的时均速度云图 4实验结论 I. 瞬态云图分析表明高速喷淋流场是一个非定常复杂湍流系统,瞬态云图是分析流动非定常特性和相干结构的直接依据;时均分析云图宏观上验证了喷淋系统覆盖范围和平均动能,瞬态与时均分析相结合,可较为完整描绘喷淋流场的物理规律。 II. 高感光度高速摄像机有效补偿了低功率激光器的能量限制,实现低能量连续激光器下的高质量PIV成像,为喷淋系统优化及成本控制提供稳定、可靠的技术路径。



微信公众号

官方抖音