在智能机器应用迅速增长的推动下,新一代机器人研究设计备受关注。如何实现快速识别定位、自动路径规划、目标运动轨迹分析预判等,成为智能机器人研究的一大难题,尤其是对一些快速、精准的运动分析过程。本期应用探析针对千眼狼高速摄像机与运动分析系统在乒乓球智能机器人研发设计中的应用展开讨论。

上海理工大学机器智能研究院季云峰教授团队,研究了一款会打乒乓球的机器人——“小丘”。近期“小丘”完成6,241次对打并获得吉尼斯认证荣誉,并且研究成果发表在2021年机器人顶级会议IROS上,获得业界认可。
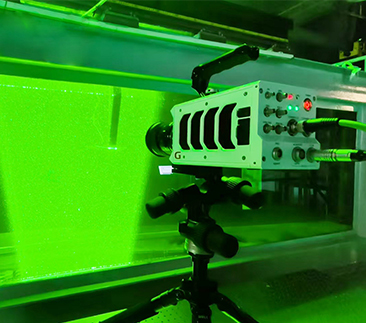
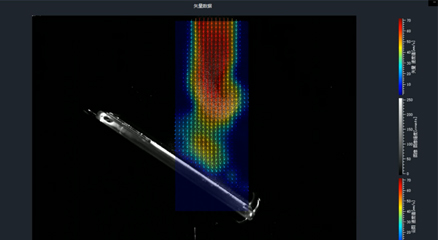
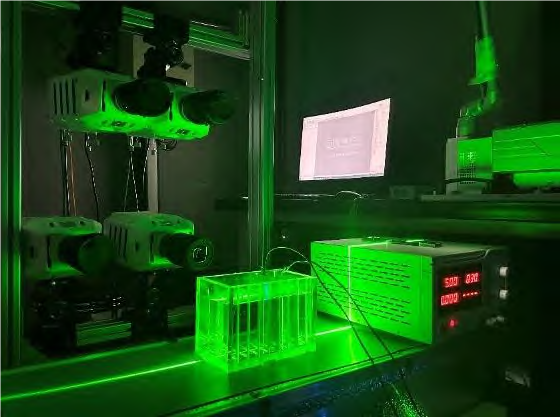
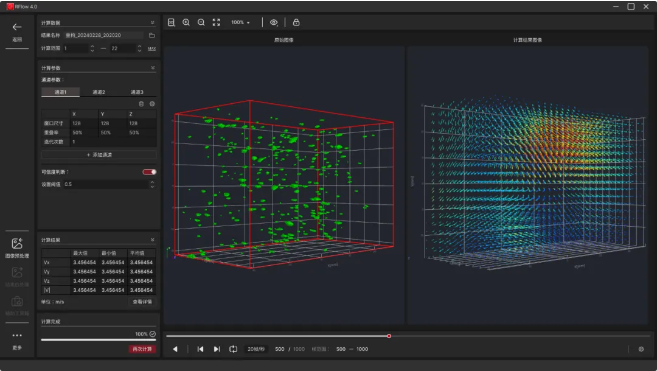
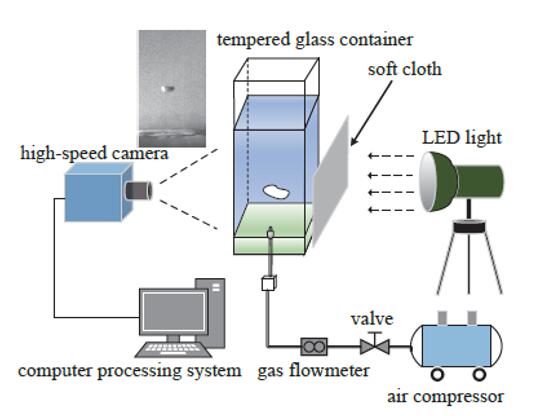
“小丘”是由视觉系统、算法预测、执行机构几个部分构成,在实战中需要在0.3-0.5秒间,完成识别、预测、控制、击球。最大的挑战在于视觉算法的创新、预测、模型的优化和控制。“小丘”的视觉系统运用了千眼狼高速摄像机和运动分析软件,用于捕捉收集乒乓球运动数据,并将其提交给控制系统。控制系统会对数据进行整合运算,判断乒乓球运动轨迹并建模,继而输出给执行机构,“小丘”根据运算结果以合适的速度和加速度在某一时点实现击球。
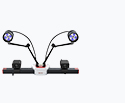
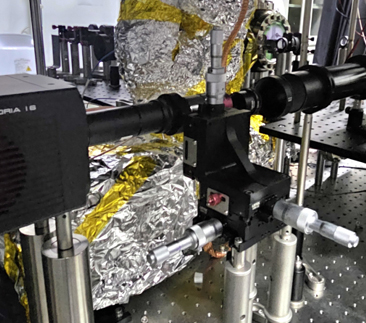
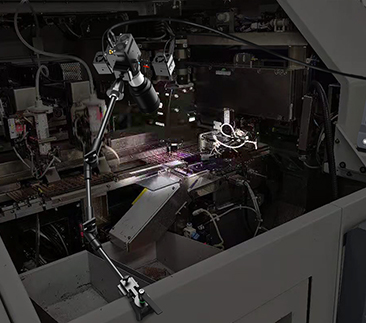
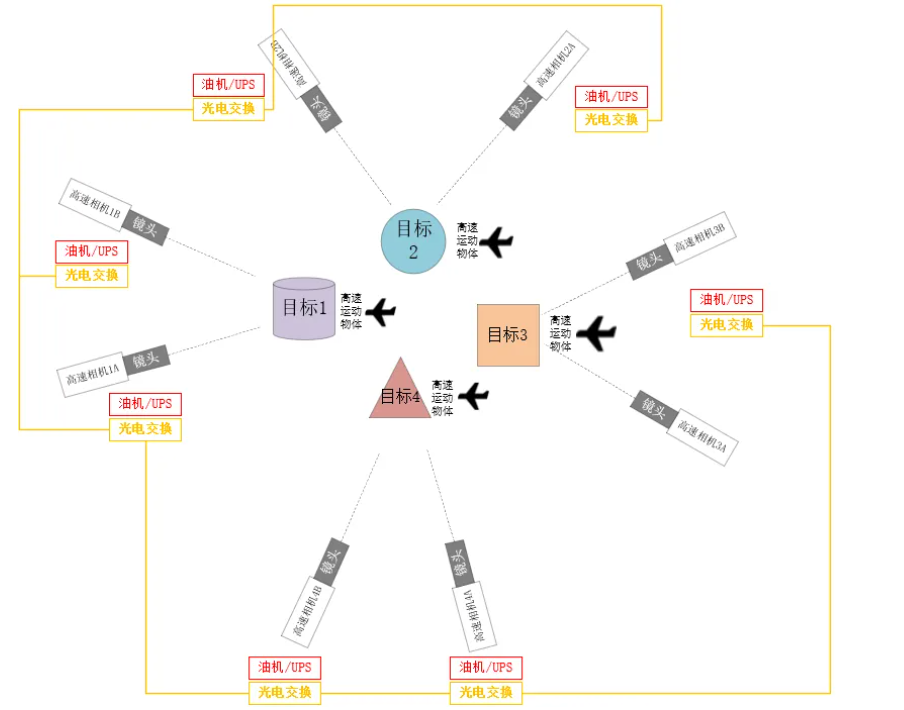
为了精准捕捉乒乓球的运动数据,季教授团队为“小丘”配备了6台相机。2台相机用于识别乒乓球的空间坐标,以每秒250帧的速率,在一毫秒内判断出乒乓球的空间坐标;2台相机会根据人的动作来判断乒乓球的旋转类型和粗略落点;2台相机以3000帧每秒的速率捕捉乒乓球旋转的数据。
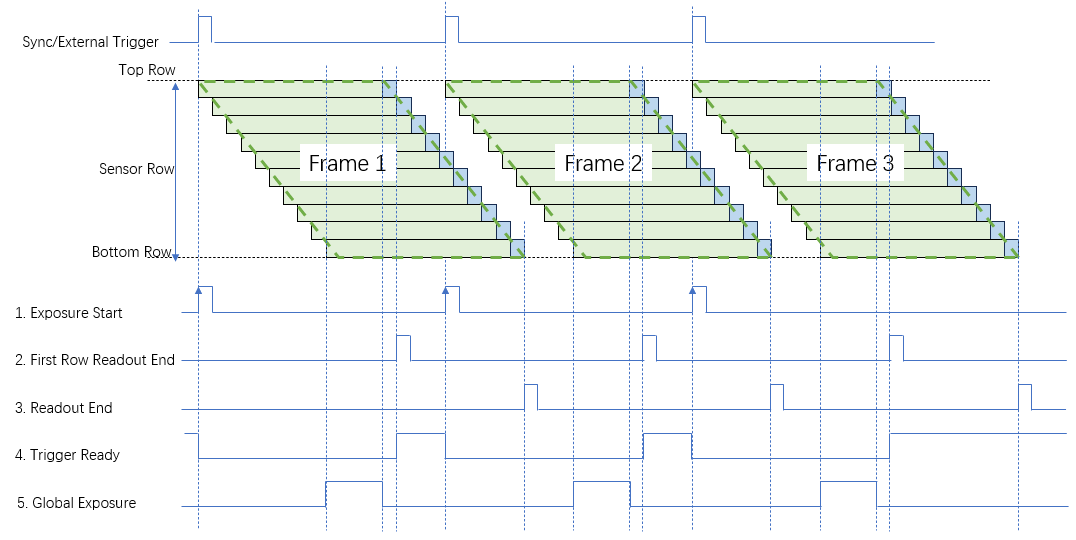
6台相机配合输出数据,需要同时触发,这考验了整套视觉系统的兼容。千眼狼高速摄像机设计了多台设备同时触发功能,可在运动过程中通过某一时间帧画面进行自动触发,让多台设备同时拍摄,并将数据反馈给控制系统建立预测模型。
季云峰教授团队基于“小丘”机器人的核心技术做了应用上的延展,研发了四足式、滚动式、履带式的智能小车。其中,轮足式小车已被实验应用于快递场景,在疫情情况下,可代替人力实现爬楼送件。

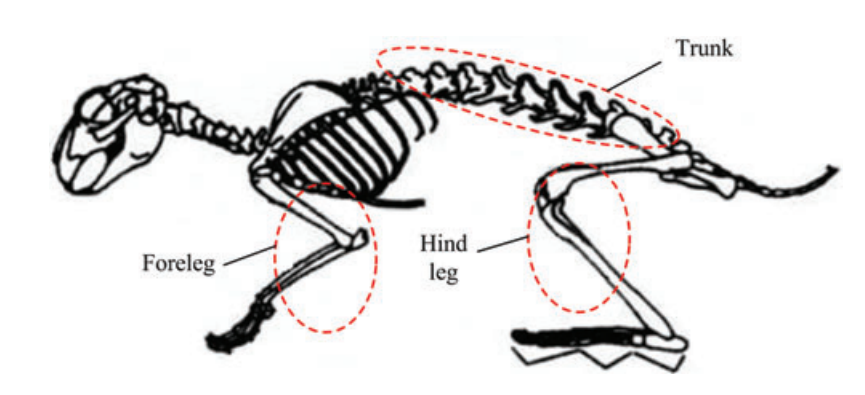
对于仿生智能机器人研究,通过高速摄像机与运动分析软件能让科研人员发现更多适用于仿生领域研发应用的生物规律,探索更多有利于机器人开发的新技术。(原文来自上海理工大学季云峰教授团队)

微信公众号

官方抖音