1.实验背景
应自主研发的Revealer-DIC三维应变测量仪(简称RDIC)位移精度验证需求, 千眼狼光学测量工程师团队在光学影像测量实验室,开展以激光干涉仪为精度计量基准,探究环境干扰、散斑密排度、散斑类型对测量精度影响的科学实验。
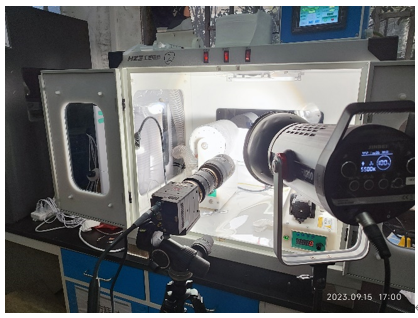
2.实验设备

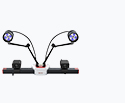
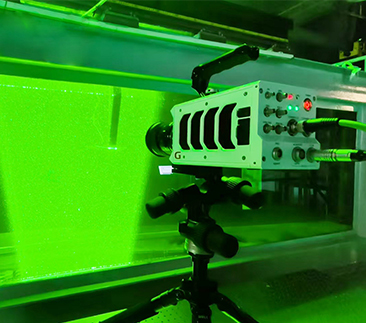
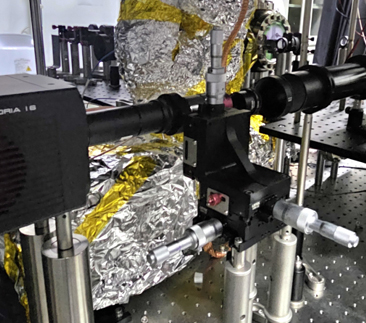
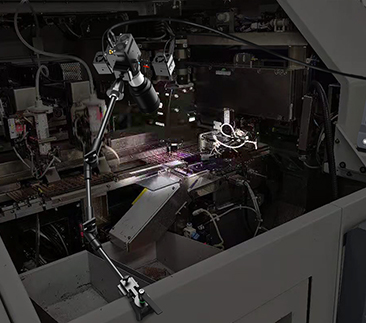
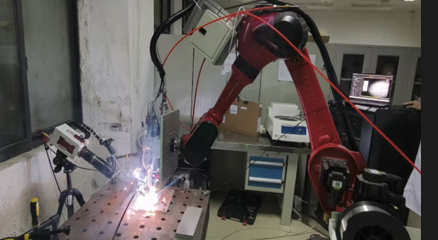
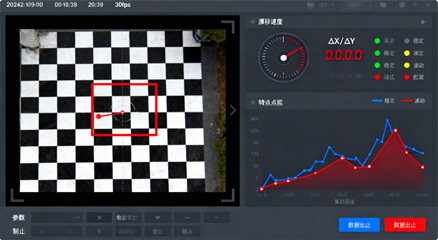
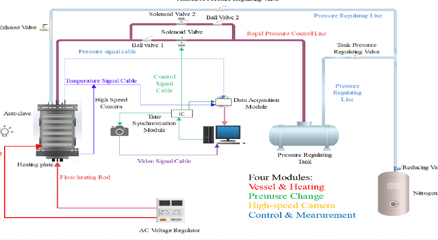
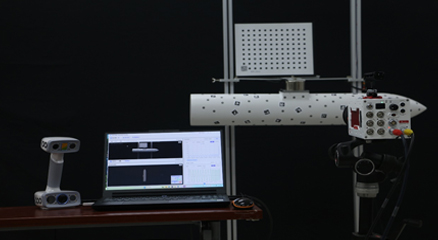
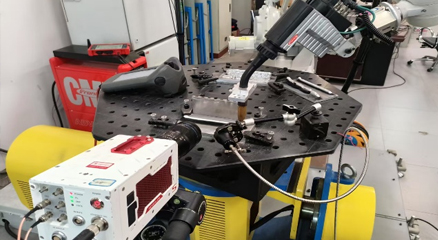
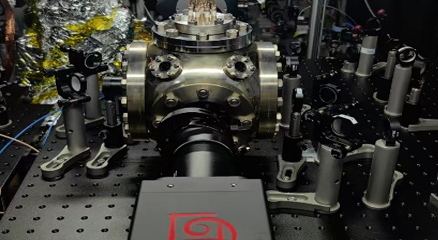
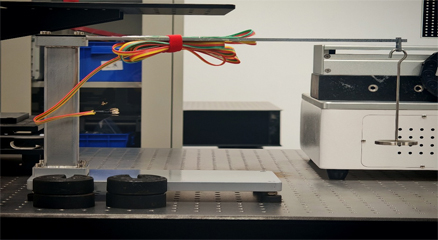
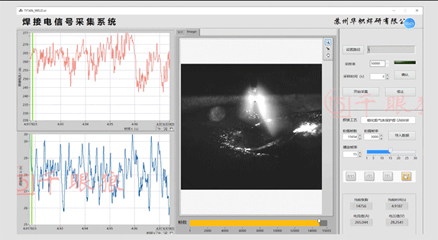
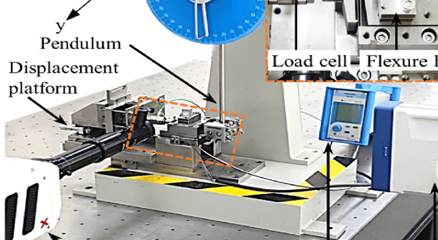
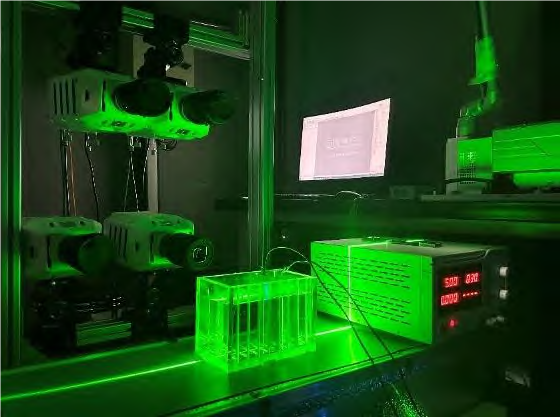
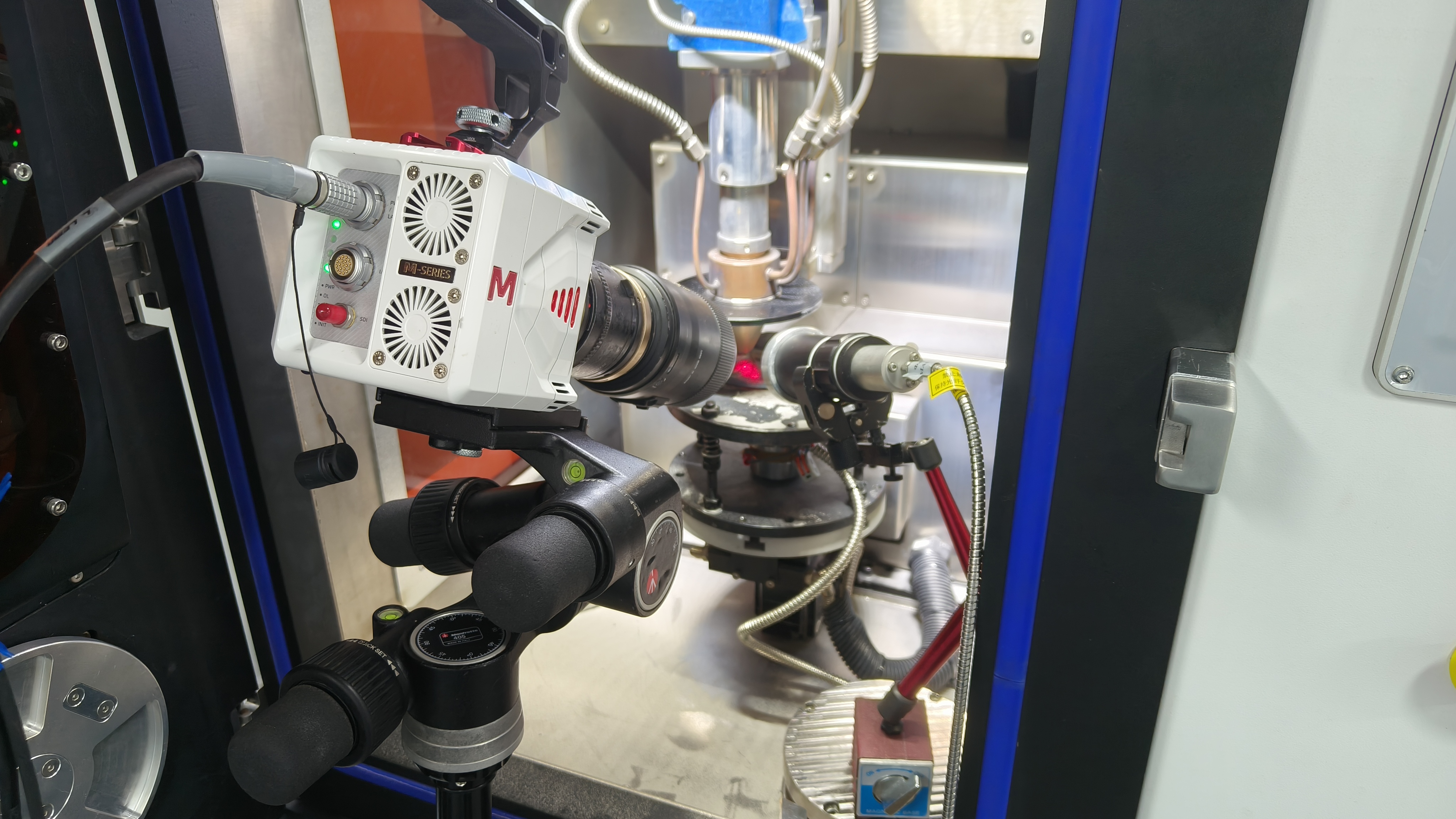
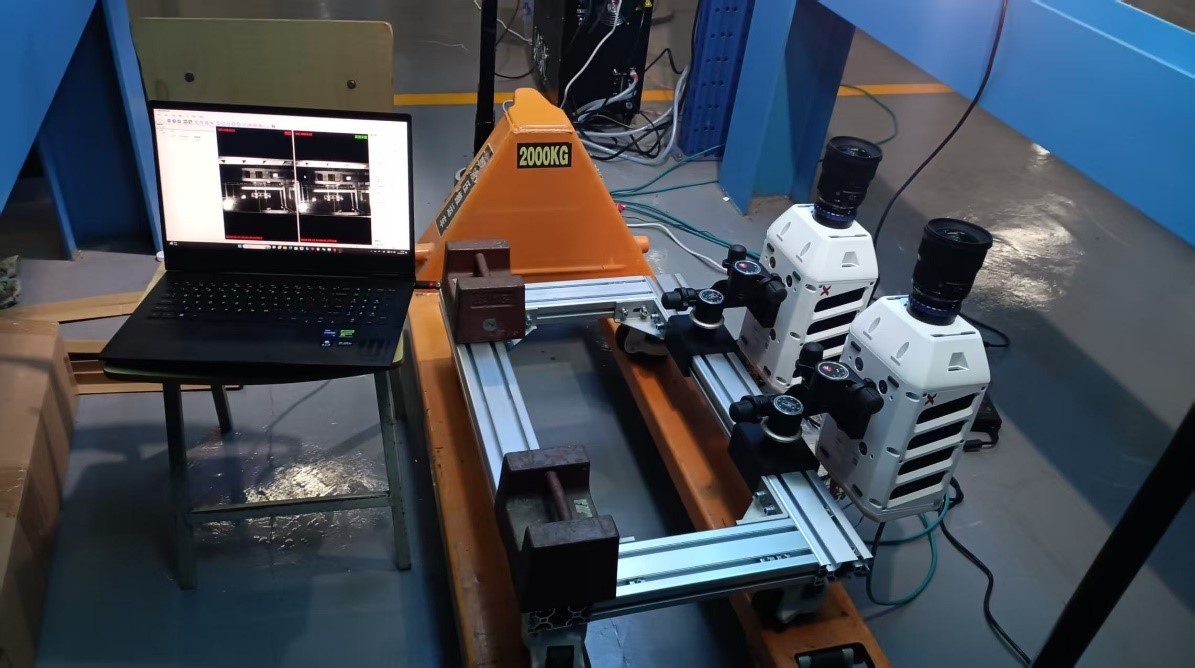
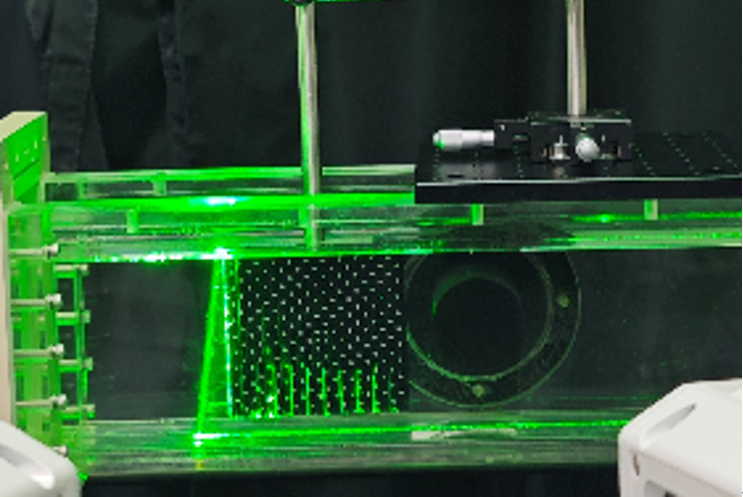
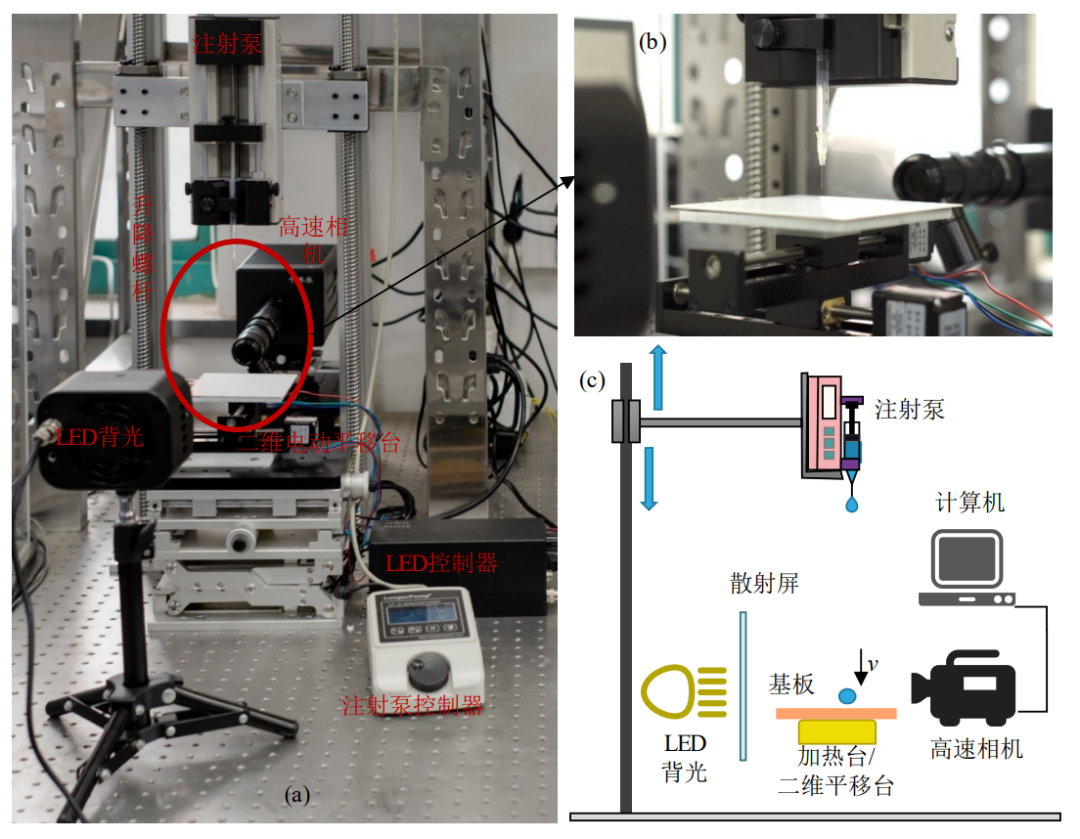
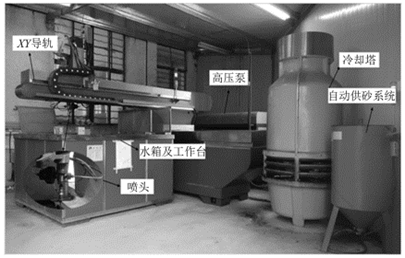
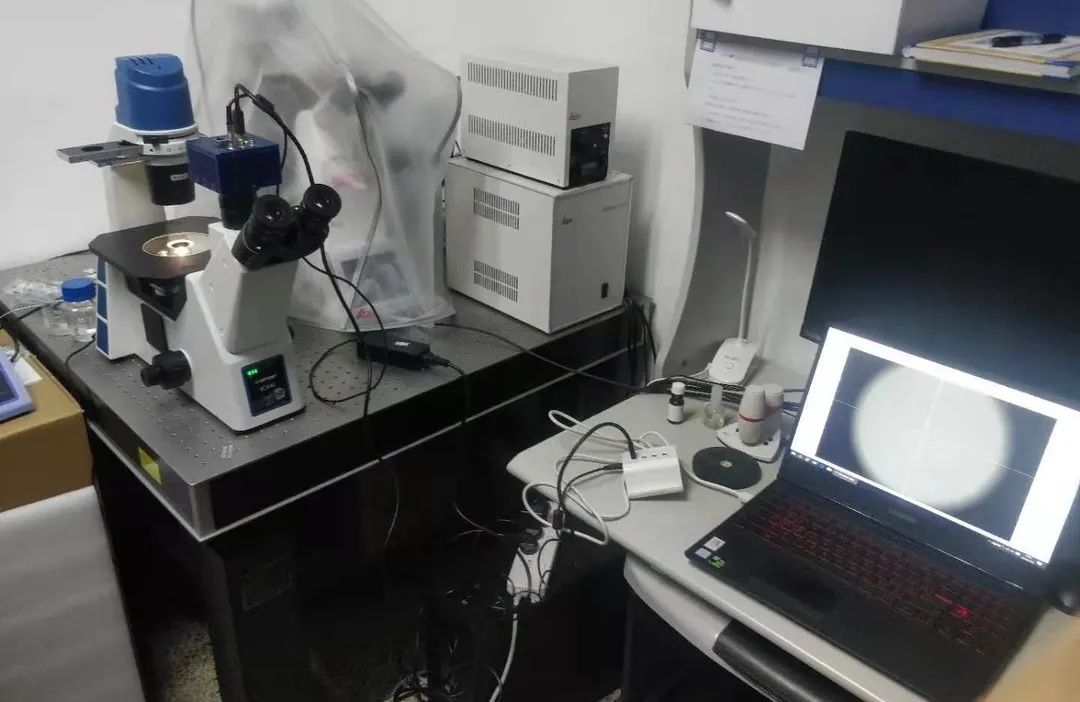
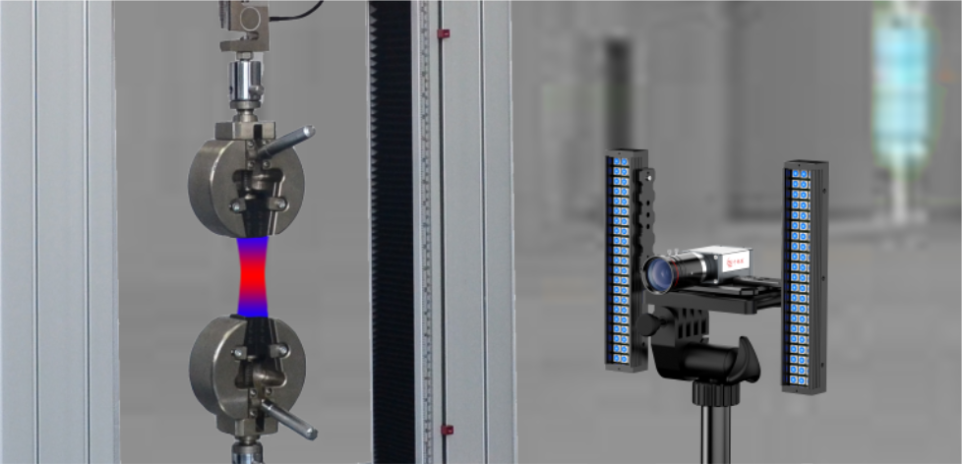
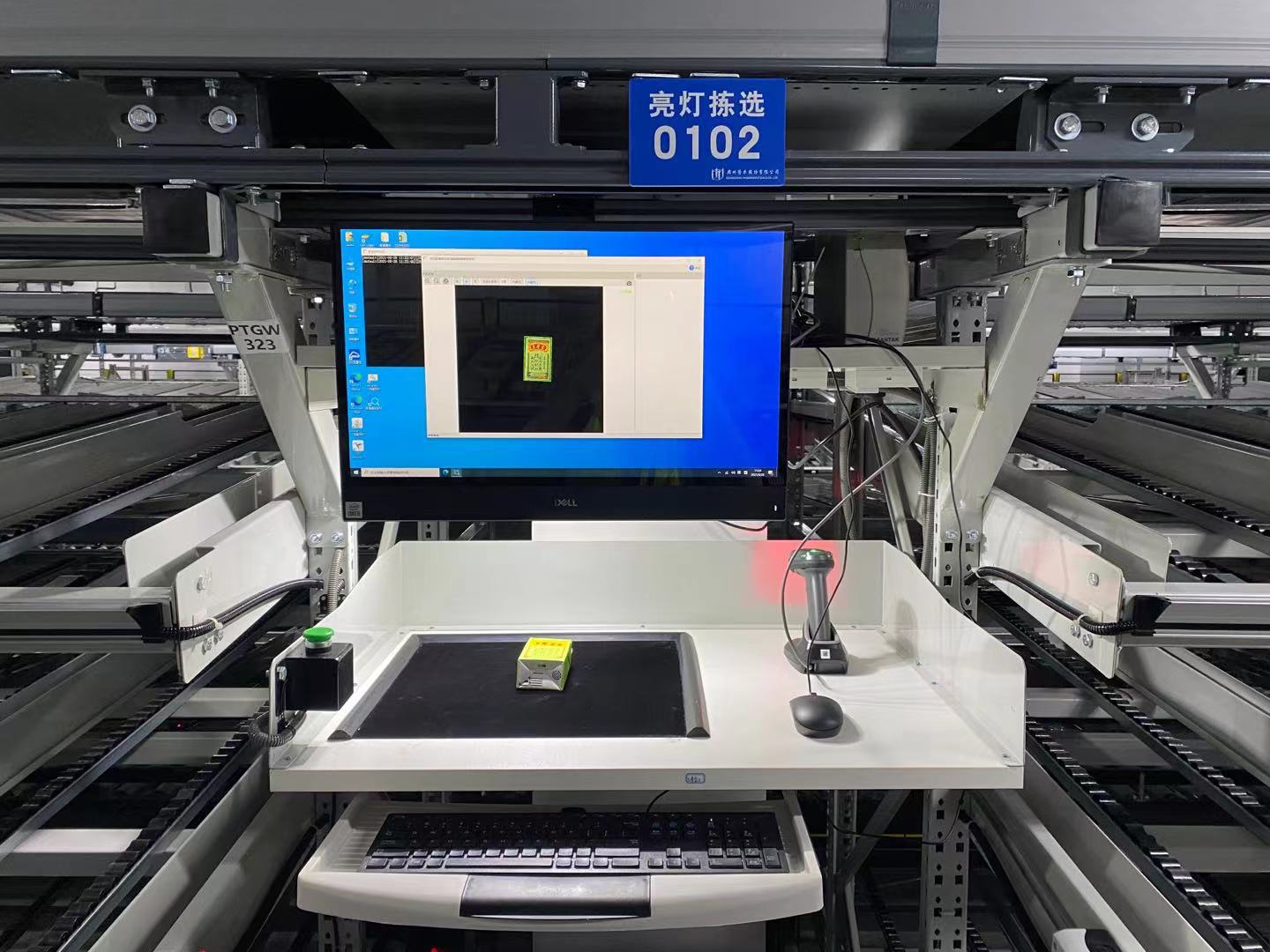
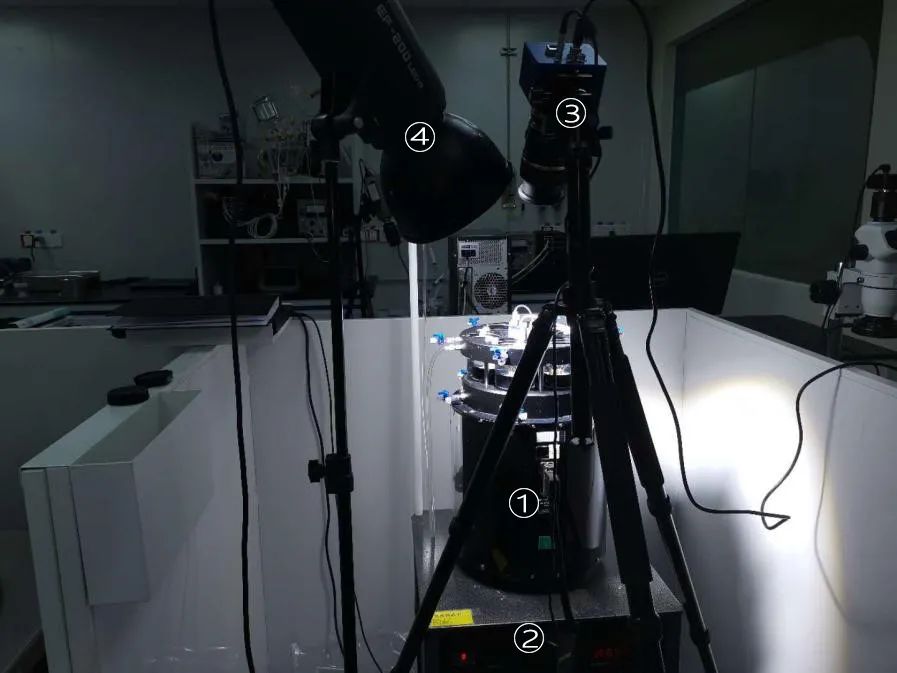
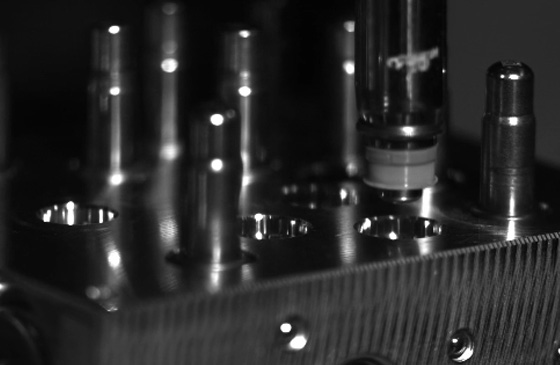
图1 实验设备一览
1)激光干涉仪(Renishaw XL-80,计量院同款)

2)Revealer-DIC三维应变测量仪

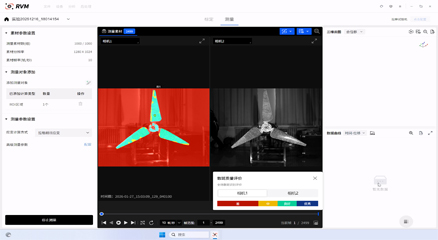
3)Revealer-DIC三维应变测量软件

4)标定板与散斑

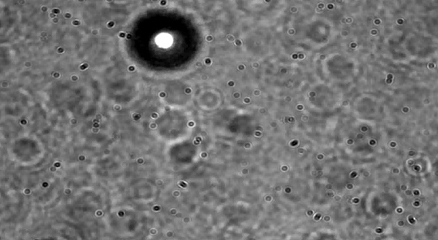
圆点标定板 散斑
5)3D位移平台、光学测量平台及其他辅助设备
3.实验过程与实验数据
3.1 环境干扰实验
第一步:搭建整套系统,如图1所示。
第二步:基于圆点标定板,采用24步标定法做标定。
第三步:控制位移平台从视野最左边逐渐移至最右边再最左边,每移动20mm采集一张图像,并用激光干涉仪获取位移基准数据。
第四步:保持环境不变,采集20帧图片,利用RDIC三维应变测量软件计算位移值,结果与激光干涉仪进行对比。
第五步:增加补光,采集20帧图片,利用RDIC三维应变测量软件计算位移值,结果与激光干涉仪进行对比。
第六步:调节中央空调风速,引起空气扰动,采集20帧图片,利用RDIC三维应变测量软件计算位移值,结果与激光干涉仪进行对比。
以上实验重复5次,数据结果如下↓↓↓

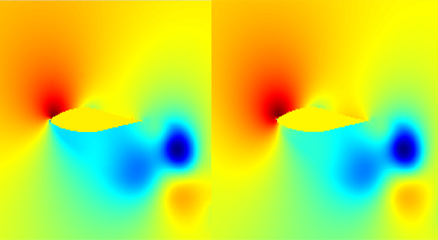
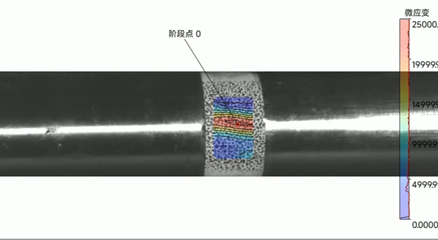
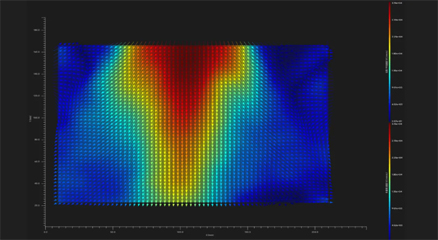
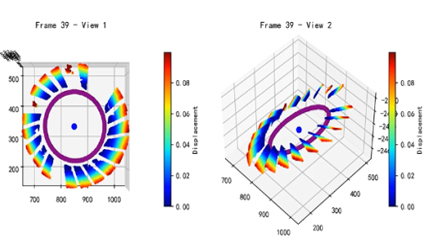
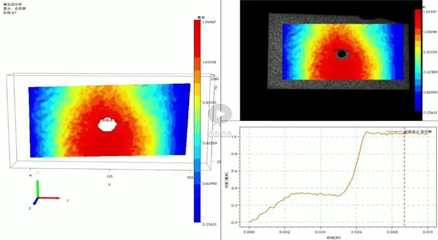
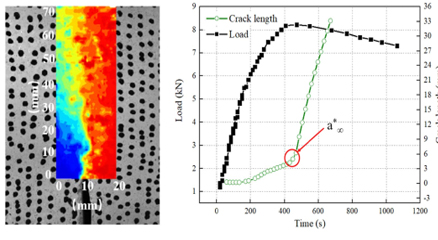
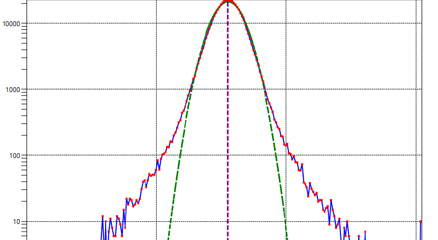
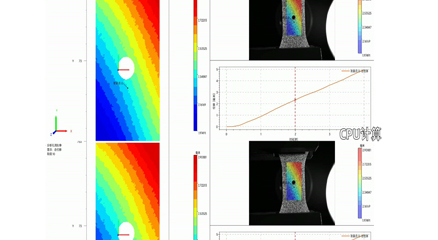
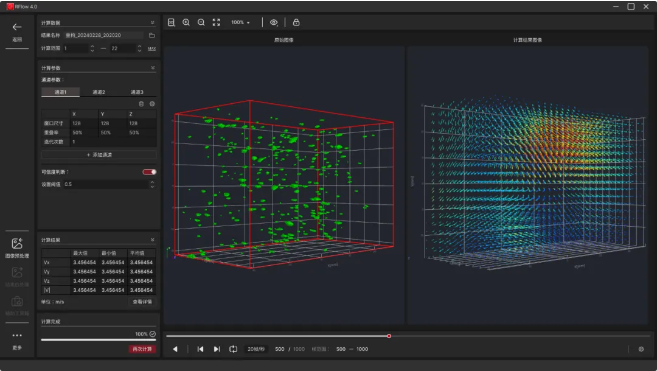
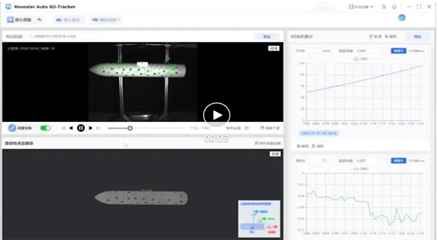
图2 环境实验测量结果

表1 环境实验与激光干涉仪对比结果(单位:μm)
3.2 散斑密排度实验
前三步同上。
第四步:跟踪并采集不同密排度散斑位移图像,利用RDIC三维应变测量软件计算位移值,结果与激光干涉仪进行对比。

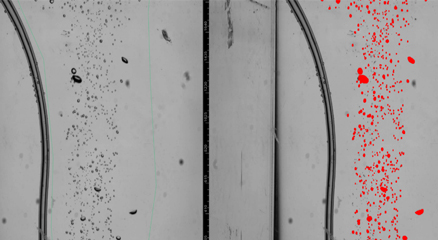
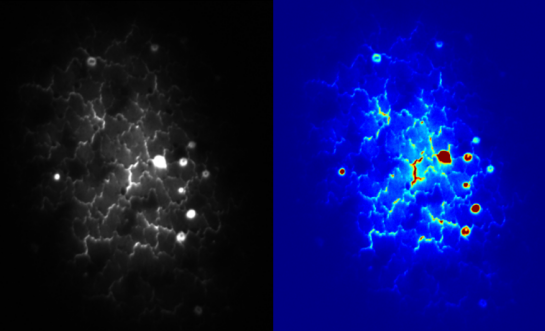
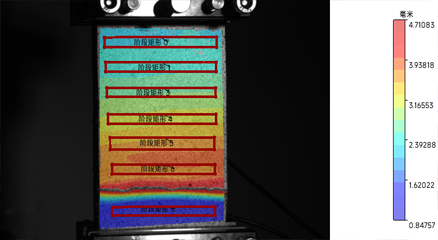
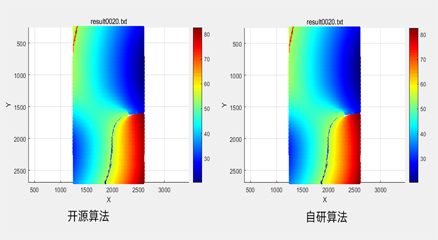
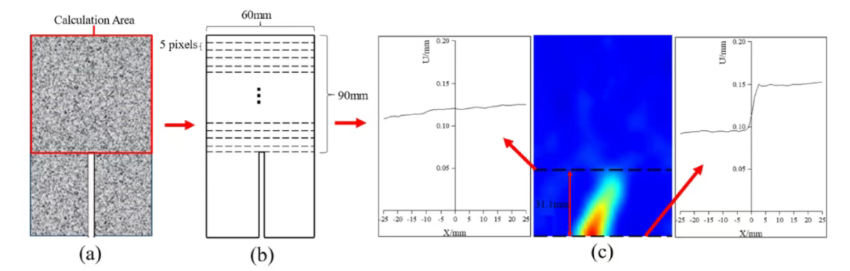
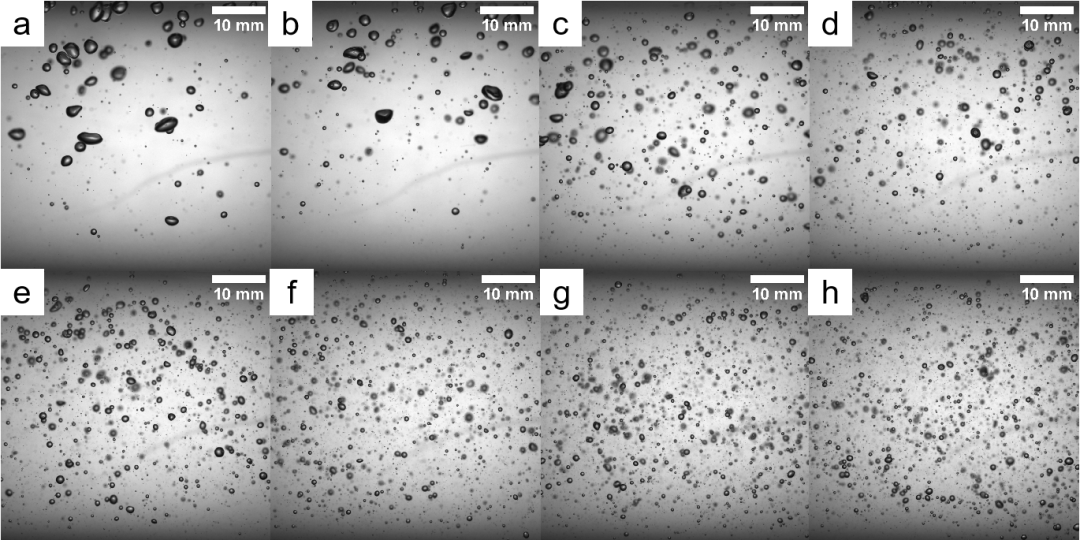
图3 散斑密排度示意(左→右,40%-50%-60%-70%-80%)

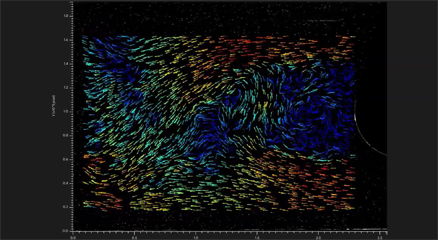
图4 不同散斑密排度测量结果

表2 不同散斑密排度测量对比结果(单位:μm)
3.3 散斑类型实验
前三步同上。
第四步:统一使用60%密排度,跟踪并采集二值散斑、高斯散斑、蚯蚓散斑的图像,利用DIC三维应变测量软件计算位移值,结果与激光干涉仪对比。

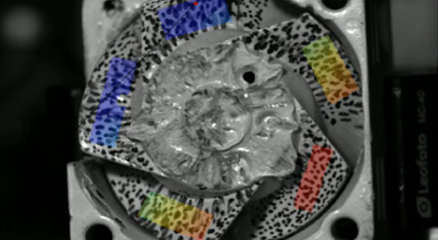
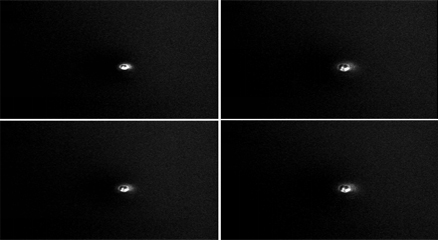
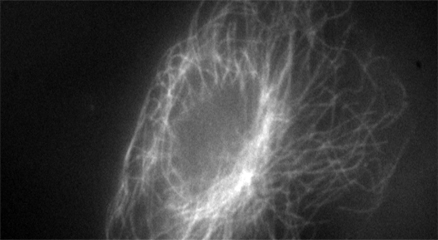
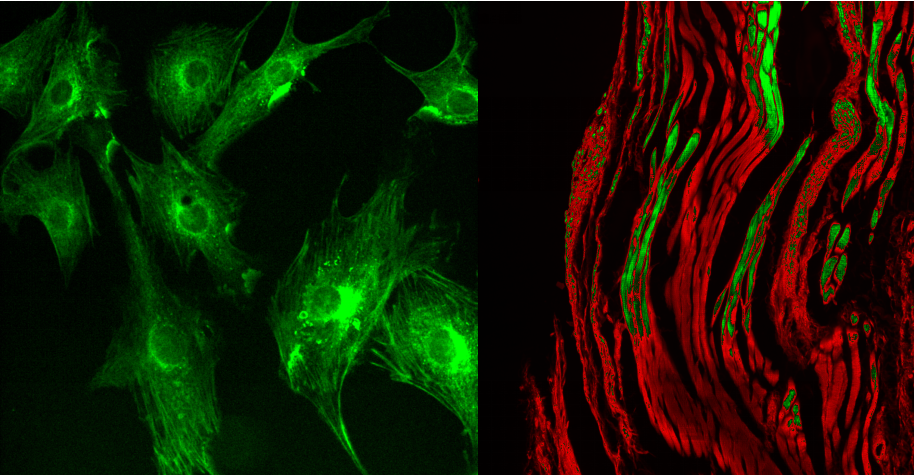
图5 不同类型散斑,左→右,二值-高斯-蚯蚓散斑
![]()

图6 不同类型散斑对比结果
4.实验结论
4.1 环境三因素中,按引起误差大小排序,光线变化>环境震动>空气扰动,与静止状态误差相比,分别增大26.5μm、20.6μm、12.5μm。测量提示→保持实验室光线稳定,避免人员走动,室内空调保持匀速运行。
4.2 散斑密排度对精度影响呈两极分化态势,40%、80%密排度下,误差较大,60%误差最小。测量提示→散斑制作,密排度以60%为宜。
4.3 重建精度横比,高斯散斑和二值散斑精度接近,均优于蚯蚓散斑。对焦横比,二值散斑更容易对焦。测量提示→优先推荐二值散斑。
附 光学影像测量实验室
千眼狼光学影像测量实验室是公司参照计量研究院、国内重点高校实验室标准重点建设的研发基地之一,占地面积约200㎡。
目前拥有专职光学测量团队40余人,其中博士7人,提供基于高速摄影技术、数字图像相关技术的全面、可视化、系统级解决方案,提供20kN座式、5kN台式万能试验机、视频引伸计、高速摄像机、高分辨率摄像机、高精度位移检测光学平台、激光干涉仪等仪器设备,可视化研究金属、复合、弹塑性等各型材料在动、静、热载下的应力应变行为、弹性模量、拉伸量、泊松比、裂纹延展特性等。
千眼狼光学影像测量实验室面向广大高校、科研院所研究人员,企事业单位技术人员开放,欢迎预约交流。


下一期,千眼狼光学测量工程师们将继续探究三维DIC应变精度的影响因素,并讨论如何抑制零加载下相机本底噪声引起的应变误差。更多技术咨询↓↓↓↓↓

微信公众号

官方抖音