在这里了解千眼狼最新动态
1 技术背景
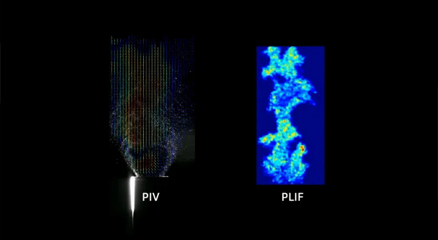
相较于统计粒子群体位移的粒子图像测速(Particle Image Velocimetry,PIV)技术,粒子追踪测速(Particle Tracking Velocimetry,PTV)因能够直接获取单粒子的拉格朗日轨迹,突破空间分辨率限制,故适用于湍流边界层研究、多相流测量等复杂流动环境。然而,粒子追踪测速(PTV)技术实际应用面临两项挑战:
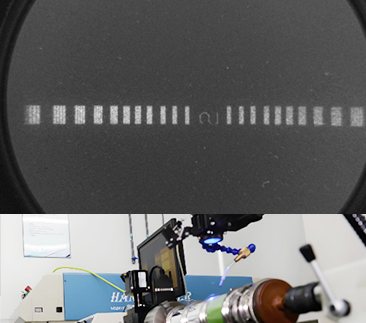
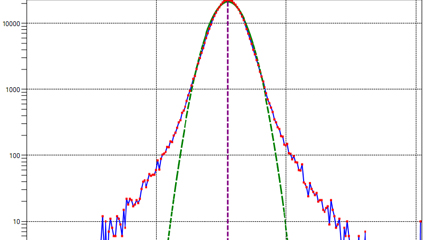
一是粒子检测与识别难度大:PTV图像中,示踪粒子通常仅占2~5个像素,且灰度分布近似高斯斑。在激光能量波动、背景噪声干扰、光照不均匀等情况会导致粒子难以识别,影响轨迹断裂和速度场重构精度。
二是粒子的灰度特征弱,传统特征匹配方法(如SIFT、ORB、RelD)失效,通用的互相关算法、最近邻匹配算法在强剪切、大梯度、高Stokes数流场中误匹配率较高,影响速度梯度、雷诺应力测量结果。
为解决上述两大难题,中科君达视界的算法工程师们创新性提出千眼狼“动态粒子背景分割技术”与“空间拓扑结构结合最优运输的匹配技术”,并进行经典圆柱绕流实验以验证PTV新技术性能。
2 技术创新
2.1 动态粒子背景分割技术(解决粒子检测难题)
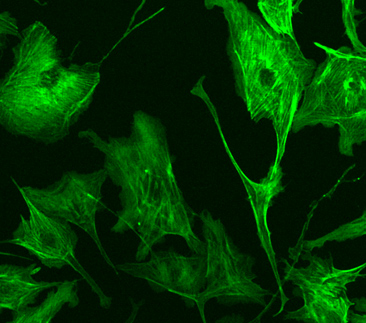
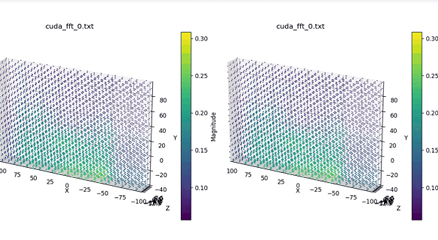
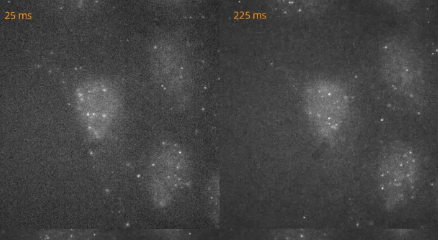
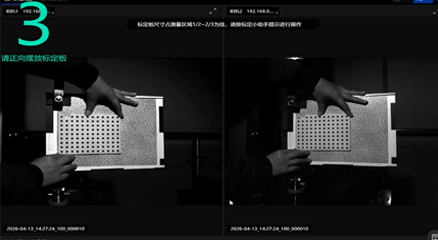
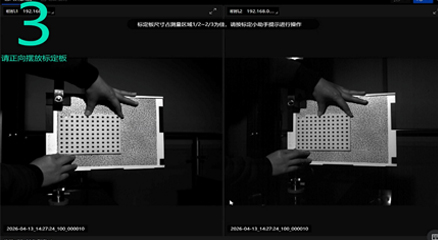
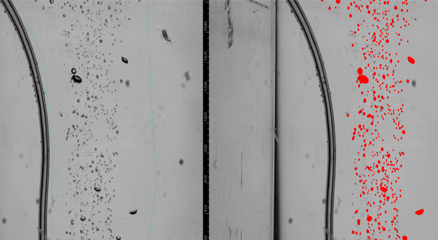
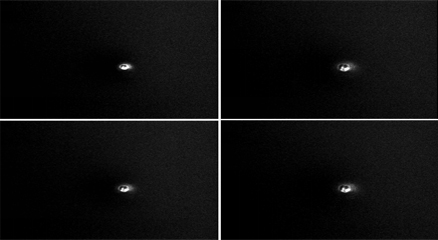
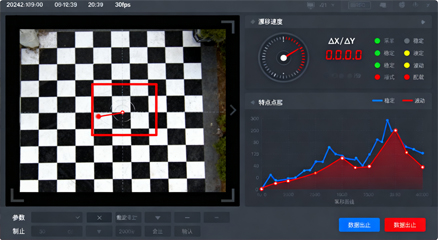
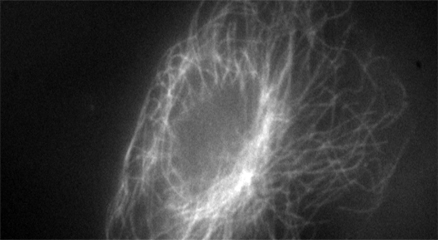
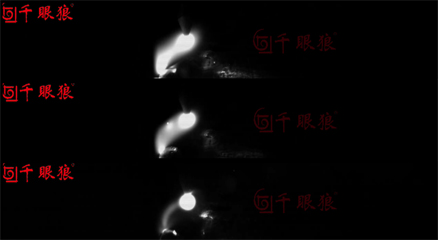
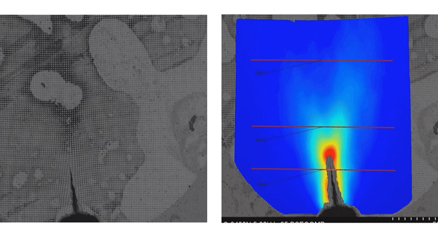
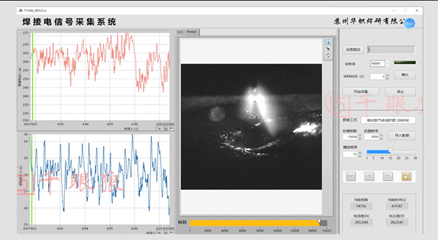
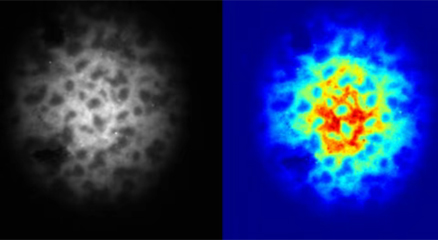
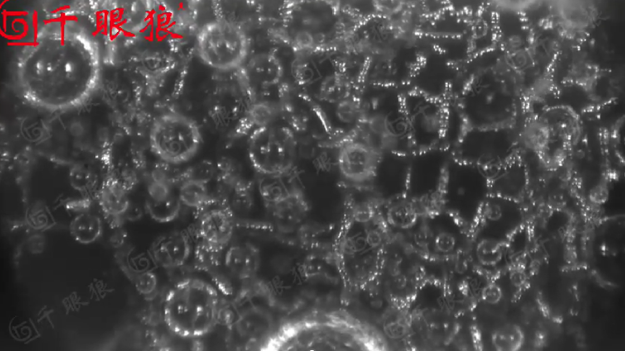
针对示踪粒子弱光斑、小尺度、噪声背景多变特征,千眼狼动态粒子背景分割技术采用逐帧更新的背景估计模型,并进行自适应亮、暗阈值计算,二值化输出粒子掩膜,构建一个可随时间和空间自适应更新的“背景模型+粒子掩膜”框架,实现粒子像元的端到端准确识别,如图1。

图1 动态粒子背景分割示意
2.2 空间拓扑结构+最优运输(解决粒子匹配难题)
针对粒子低特征、灰度无效问题,千眼狼“空间拓扑结构+最优运输”匹配技术引入空间几何结构替代灰度特征的新思路,即将粒子集视为“拓扑图”,技术路径如下:
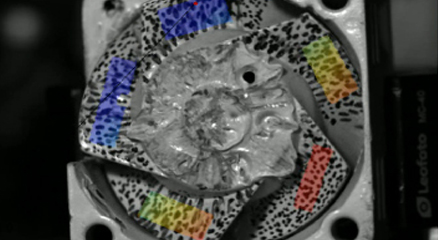
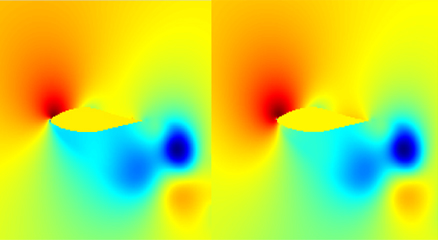
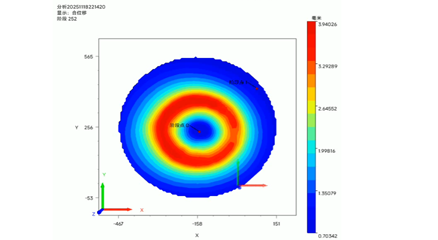
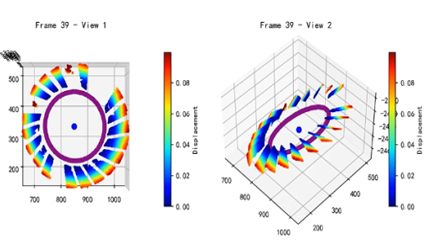
构建空间拓扑结构:对每一帧的任一粒子,以局部k-NN建立Delaunay或Gabriel图,从局部领域中提取边长、夹角、面积、局部密度,形成5~7维拓扑签名,即建立拓扑形状辨识粒子周围的空间结构(图2)。

图2 空间拓扑结构示意图
匹配最优运输: 对t帧和t+1帧执行相同的拓扑签名提取操作,得到两组离散分布μ 和v,基于“边长差异+角度差异+密度差异”构建代价矩阵,再利用Sinkhron-IPOT快速迭代算法计算并返回软匹配矩阵T ,将“找相似”的粒子匹配转化为“运质量”问题。
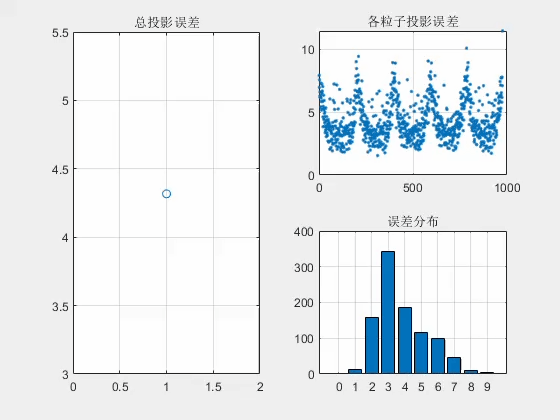
匹配后进行多重物理与几何检验:一是采用运动学门控进行位移、加速度和旋转一致性检验,剔除3%异常匹配;二是进行最小环校验,即对Delaunay环闭合差<0.1 pixel锁定匹配;三是执行高密度场景下的缺失补偿机制,若粒子密度>0.15 ppp,以OT结果作为虚拟检测,反向生成高置信度伪粒子,再进行一次迭代补偿,实现0.05 ppp的等效增密效果,匹配率提升18%。
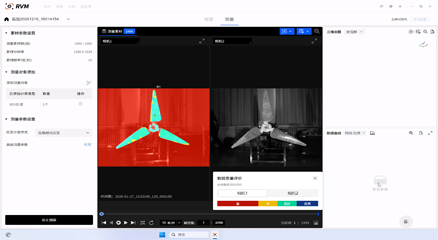
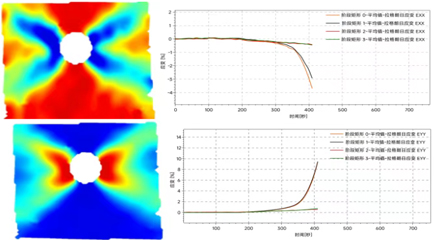
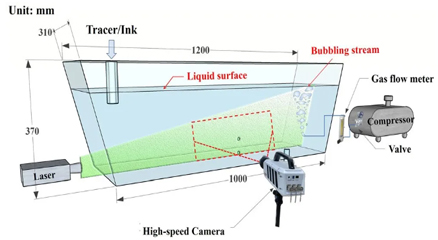
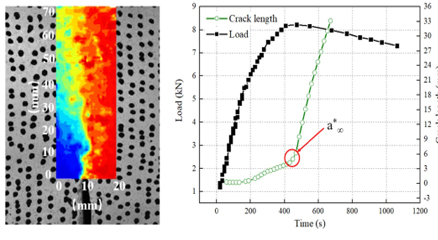
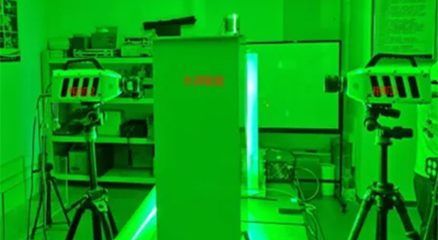
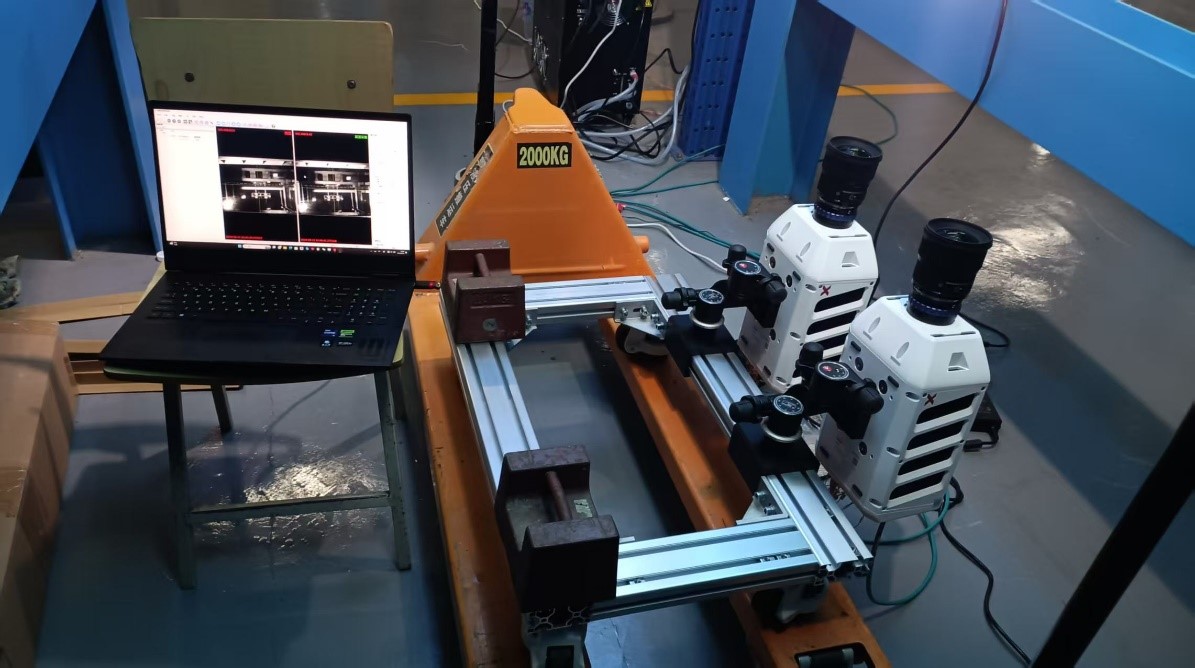
3 技术验证
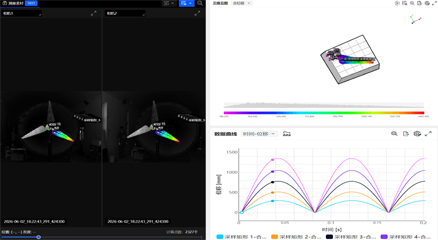
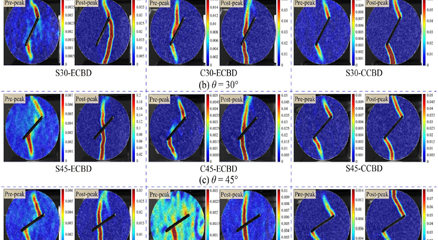
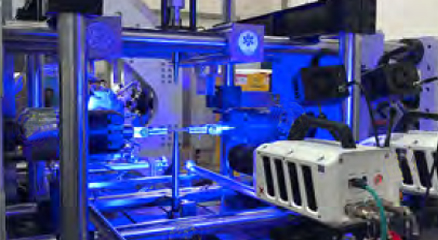
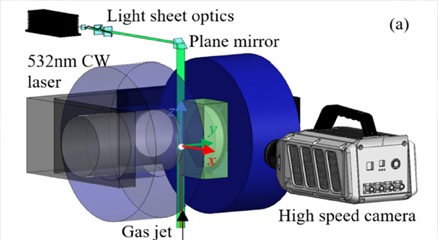
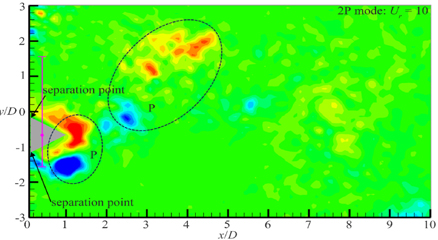
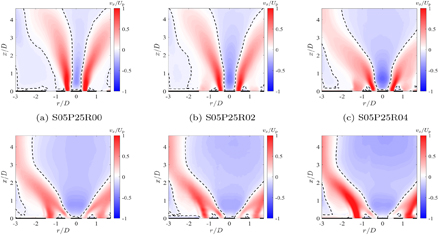
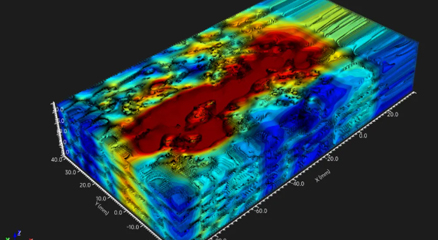
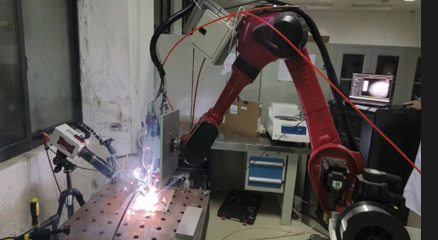
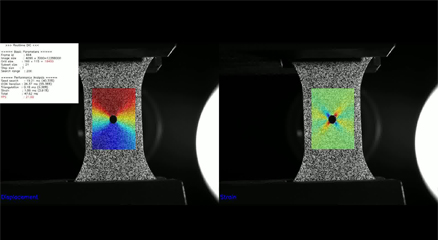
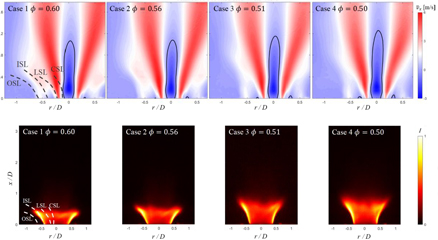
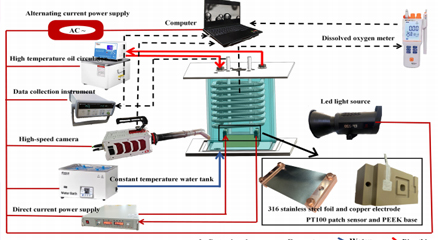
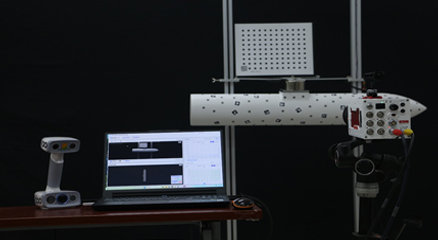
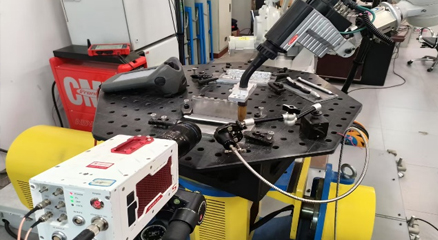
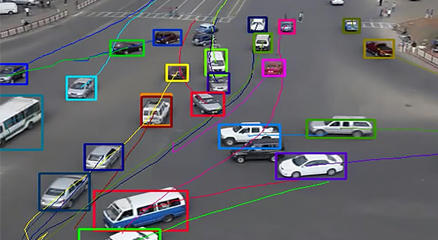
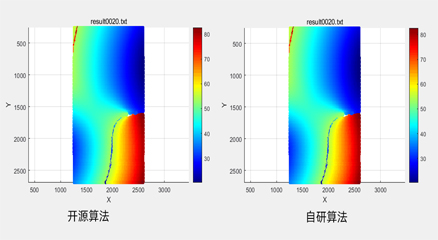
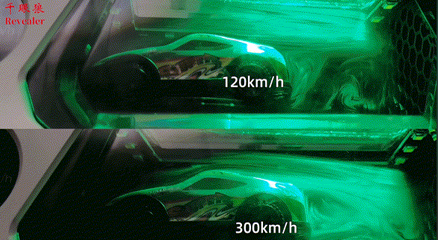
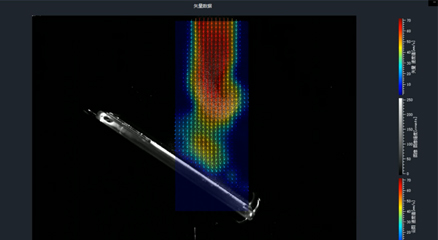
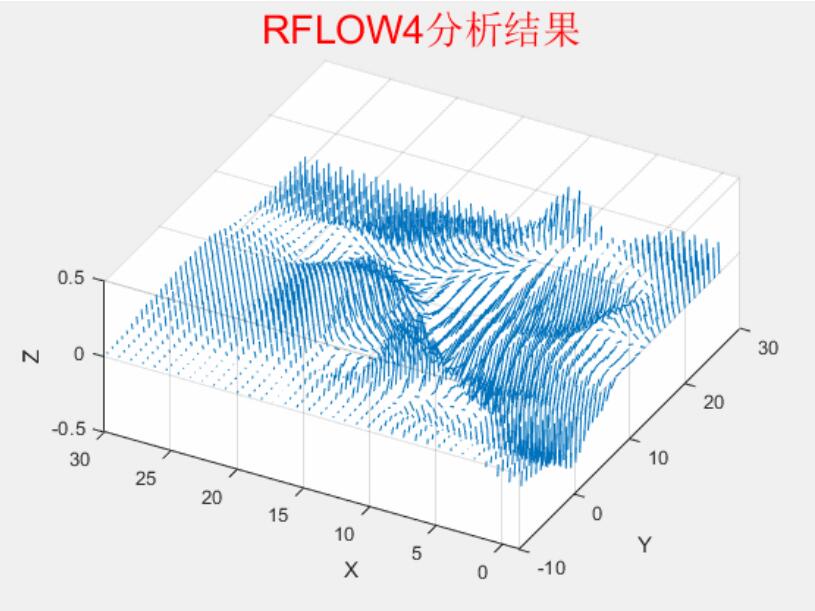
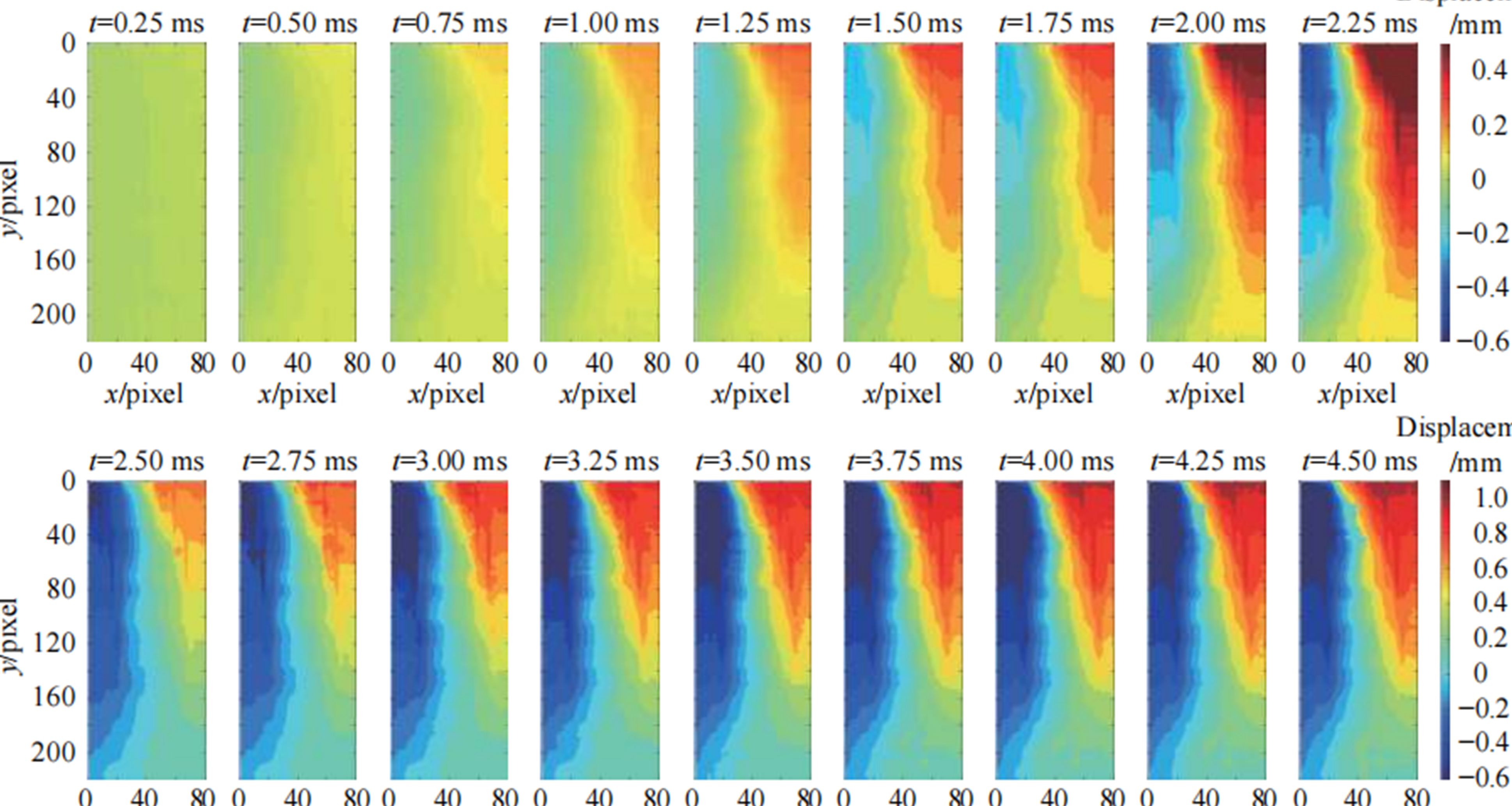
为验证算法的先进性与可靠性,中科君达视界算法工程师们在流体力学实验室进行经典圆柱绕流实验,应用千眼狼PTV新技术,通过“动态粒子分割”与“空间拓扑结构+OT”匹配重构流场与拉格朗日轨迹,结果如下:
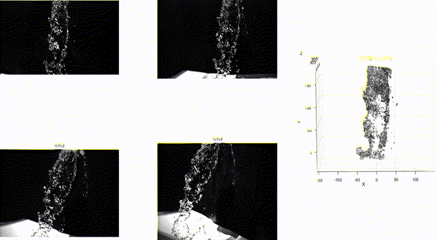
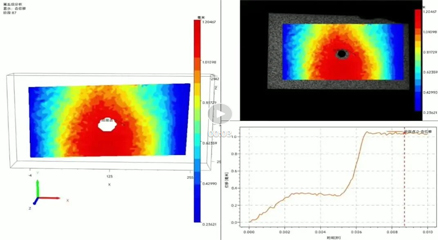
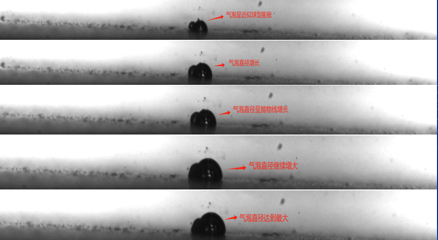
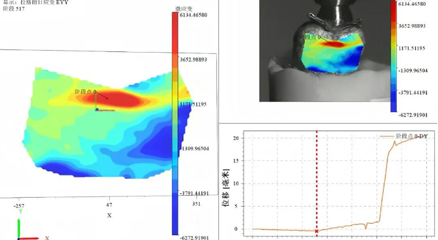
流场速度:流场速度分布连续、光滑。

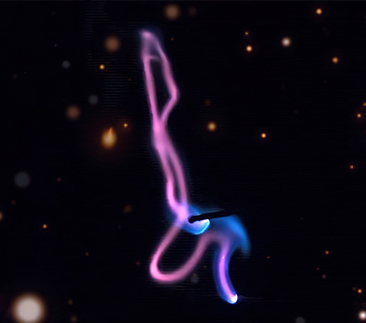
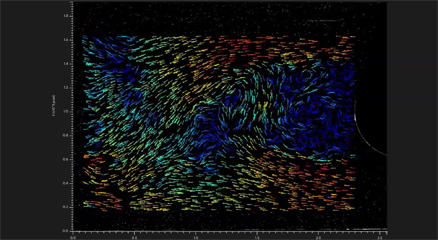
迹线:粒子轨迹展示了涡旋结构演化。

结果表明,千眼狼PTV新算法在具有强剪切和高粒子密度条件下的圆柱绕流实验中,可实现粒子轨迹的连续、准确重构。
4 结语
中科君达视界自研的千眼狼粒子追踪测速PTV新技术:动态粒子背景分割与空间拓扑结构最优运输匹配方法,有效解决了粒子检测分割难和匹配特征少的核心难点,在强剪切、高密度流场中实现<1%误匹配率,新算法摆脱了传统方法对粒子特征的依赖,为流体动力学研究中提供高频、高保真的拉格朗日速度场和粒子轨迹数据。

微信公众号

官方抖音